 Tweet
Tweet
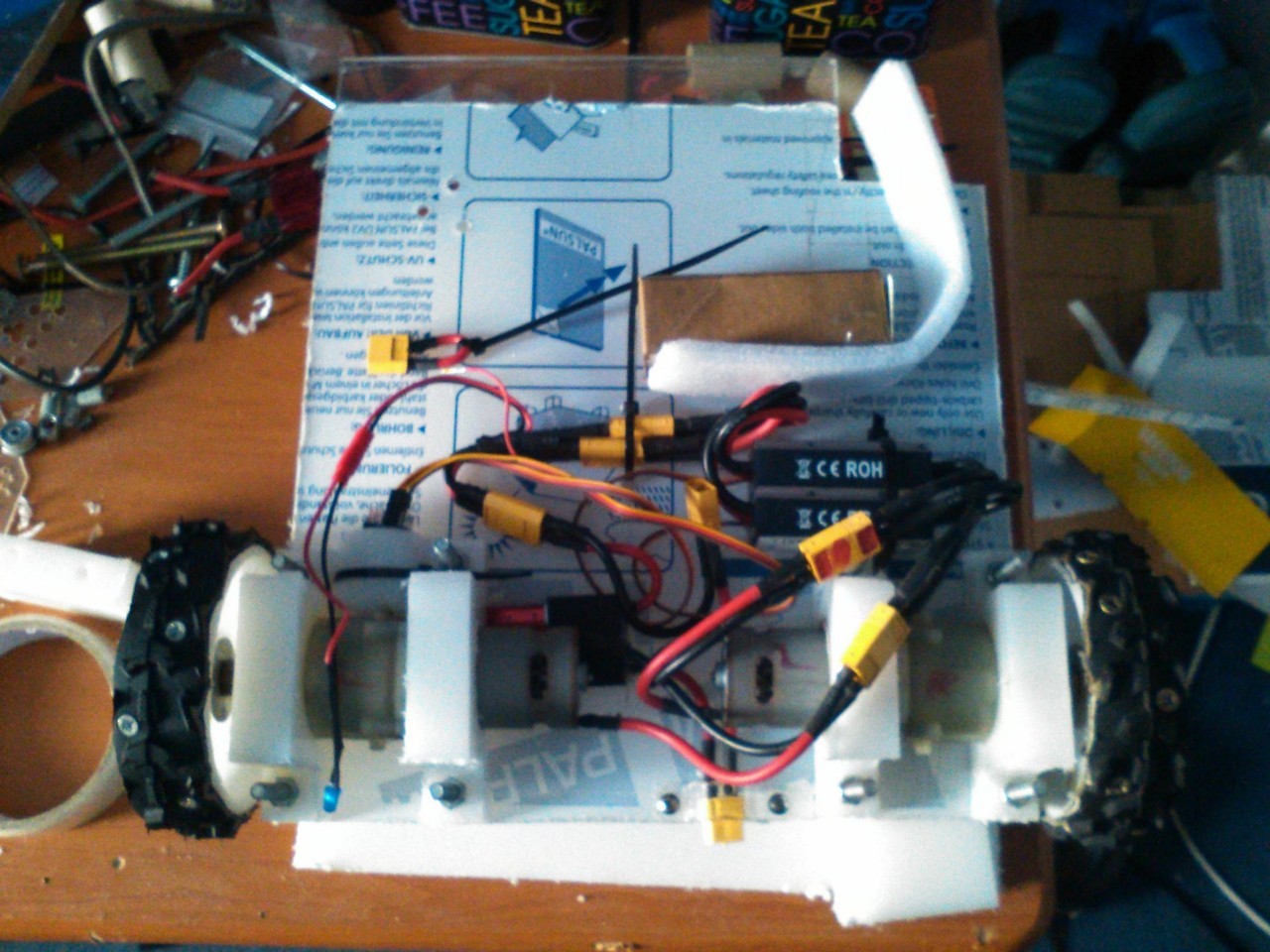
So I went to do the test run and... the receiver is busted. I had to check both motors, both ESCs until I found the fault that was stopping both motors from running at the same time. It appears one of the channels used for drive on the receiver is not working. At least it's a cheap part to replace.
-
-
Pondering on drive configuration. Wither to go with gearboxes directly running the middle wheel and connect the front and rear wheels through pulleys.
Or run the brushless motors to the rear wheels with another pulley and then run pulleys to the middle and front wheels.
Comment
-
Personally I'd go with the first one, because a) it's harder to get high reduction out of pulleys (the gearbox will likely be much higher and won't slip) and b) I like Sewer Snake, and that's how they do it. :PComment
-
I had figured that would be a factor but I'll need to mod the gearboxes to have extended drive shafts to support the whole wheel and pulleys.Originally posted by R9000 View PostComment
-
You can get extra long shafts for the Banebots P60 gearbox; making your own shafts is a precision job that needs both a lathe and a mill.Comment
-
-
So the Receiver and drive mystery thickens. When I mix the Aile and elev channels through the mix 1, mix 2 and the V-tail mix on my DX6i the rudd channel suddenly has control over the left motor. The only way the mixing works is not using mix 1, 2 and V-tail mix and instead use Elevon mix instead. is this normal? or is something busted?Comment
-
Don't Worry this thick-o work it out I had to set one of the mixes to -100% to get it to workComment
-
So I’ve been using Wolf-E’s test platform to help get a sense of scale with parts yet to be added such as the Lipo battery mocked up in cardboard.
I came to the conclusion that it’s possible to add 2 more 12volt motors and using HDPE. I can make a 4WD weaponless CSB instead of Wolf-E.
Comment
-
If you go weaponless remember that not every event will accept you - Insomnia rejected my completely finished pusher in favour or builds that had barely been started.Comment
-
I already know about RoboChallenge's preference of active weapons, this version would be for live events and will gradually be upgraded until it reaches the more advanced design I have made of CSB.Comment
-
You use two esc with bec. you should remove the red wire from on signal cable / connector.Comment
-
-
Finally got to test drive the Featherweight sadly the battery began running low before I could film it.

Comment
-
Finally got to film CSB/ Wolf-E driving in my kitchen. Even though it's not ready for the arena, I'm very happy to have something working and moving about at this point.

Comment
Comment