 Tweet
Tweet
Originally posted by mrsam
View Post
-
That is true! But when all you have is a featherweight, and you've turned up to fight at your local event, you either fight anyone in the melee or go home. I'm sure most of us would go down fighting, as that's the name of the game. It doesn't put me off, and I have nothing against the spinner feathers. It just makes me want to build a spinner killer wedge even more
-
I think this is the crux of it really - it's not that the FW rumble at EXR is somehow "bad", it's just a shame that there are so few events available to go to. A "free-for-all" is a bit of fun but isn't a great place to test a robot or learn to drive, but if it's all you have nearby then that's where you'll end up.Originally posted by TeamKnightshade View Post
Anyway, sorry to see such a nicely built robot get wrecked so badly, hope the damage is ultimately repairable!Comment
-
I'm lucky in that I live near Stevenage which hosts Robots Live which has non-spinner melees for featherweights and worst case scenario it's nice to watch the Heavyweights even if my featherweight did badly. It's a steep learning curve as a lot of roboteers have several years experience, but there are plenty of opportunities to learn!Comment
-
For 2020 CSB 2 will be rebuilt into CSB 2.1. A completely new chassis made from HDPE (there's still some Hardox and Aluminium in there) and features interchangeable wedges and side panels to fight spinners.
The Robot is slightly bigger and current weight calculations look to have the robot roughly 1kg lighter on the main configuration. The weapon has been improved upon the old one that suffered from some screw ups I made in the CAD. The weapon arm can now fully extend and reach 30cm in height. The drive as been changed, the single stage spur gears are just a headache and well... good hockey pucks :P The drive will use 5:1 planetary gearboxes paired up with brushless motors and have been moved to the front wheels so the internal layout is more streamlined.
The HDPE chassis is basically a 6 wheeled version of CSB 1's chassis. I realised how simple it would be to make once I stopped overthinking it. This also means the build should be cheaper as all the HDPE stuff can be done by me, plus most of the internals can be reused in CSB 2.1 as the only (planned) change is the drive motors.
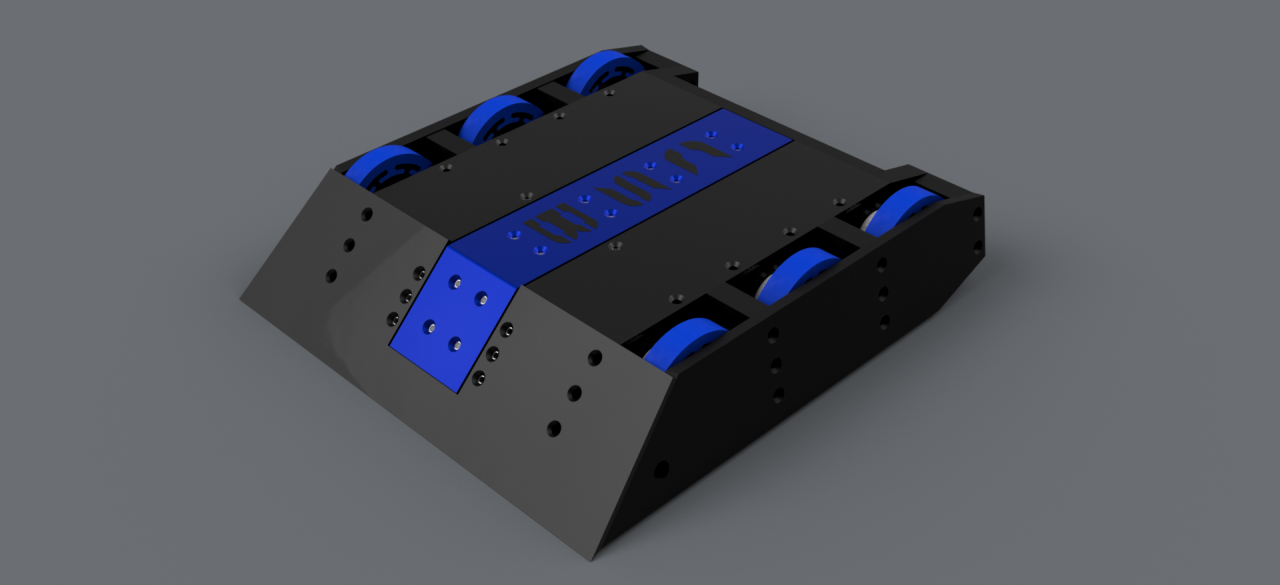
(The following renders have the old wedge mounting points)

Comment
-
New design looks great!
Also going back to the previous posts a bit, Robodojo is a great place to fight for feathers without going into big melees if it isn't too far north for you.Comment
-
Thanks, really need to post the updated design here, as I've been tweaking the design a lot. Sadly Robodojo is too far for me to get to from Dover. Fingers crossed once this pandemic is over and I've moved in with my boyfriend up north I can attend Robodojo as my boyfriend lives closer.Originally posted by Andy View PostComment
-
Two questions one how belts gonna work as they are all on tye same side, two what gearboxes you using ?Comment
-
Like I said to Andy this is a rather old version of the cad the belts was basically running on wider pulleys on one side but the updated version has it basically running the pulleys like in CSB 2.0, currently I'm experimenting to reuse the old drive.Originally posted by Maxamuslead View Post
The drive in the cad above is BaneBots p61 gearboxes running 11:1 with a Propdrive 42-48 650kv motors.Comment
-
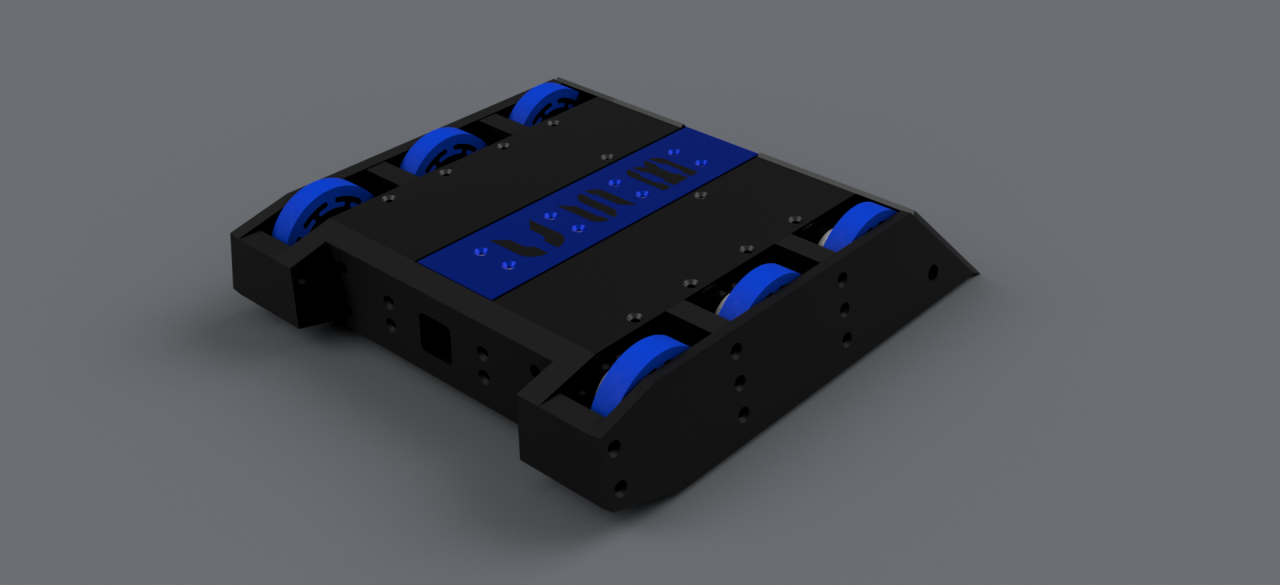
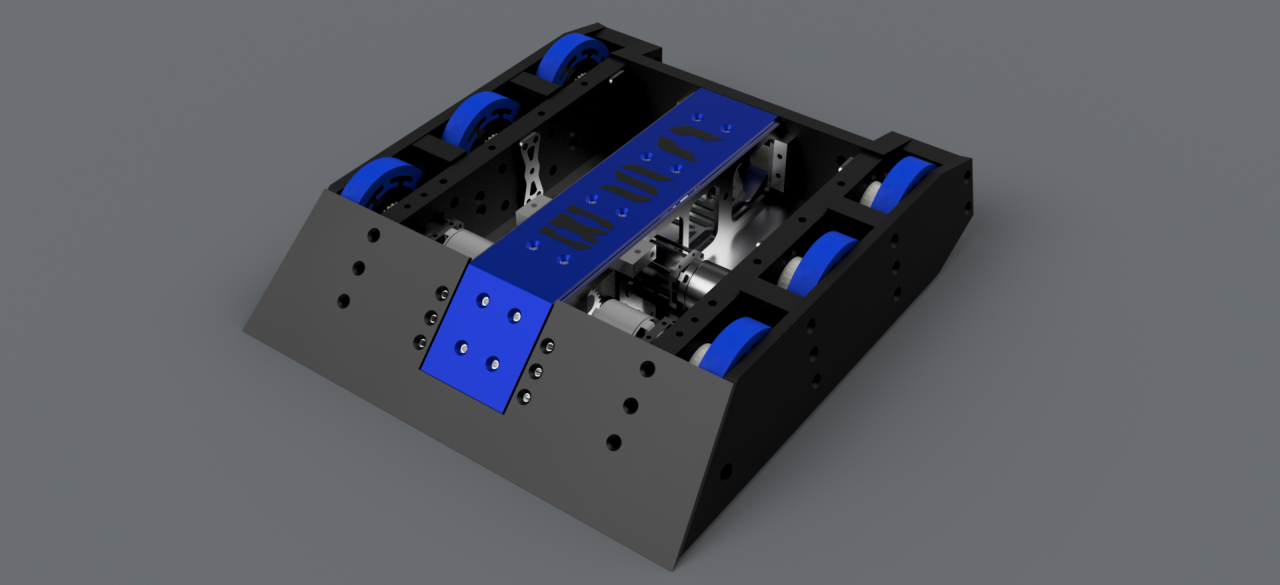
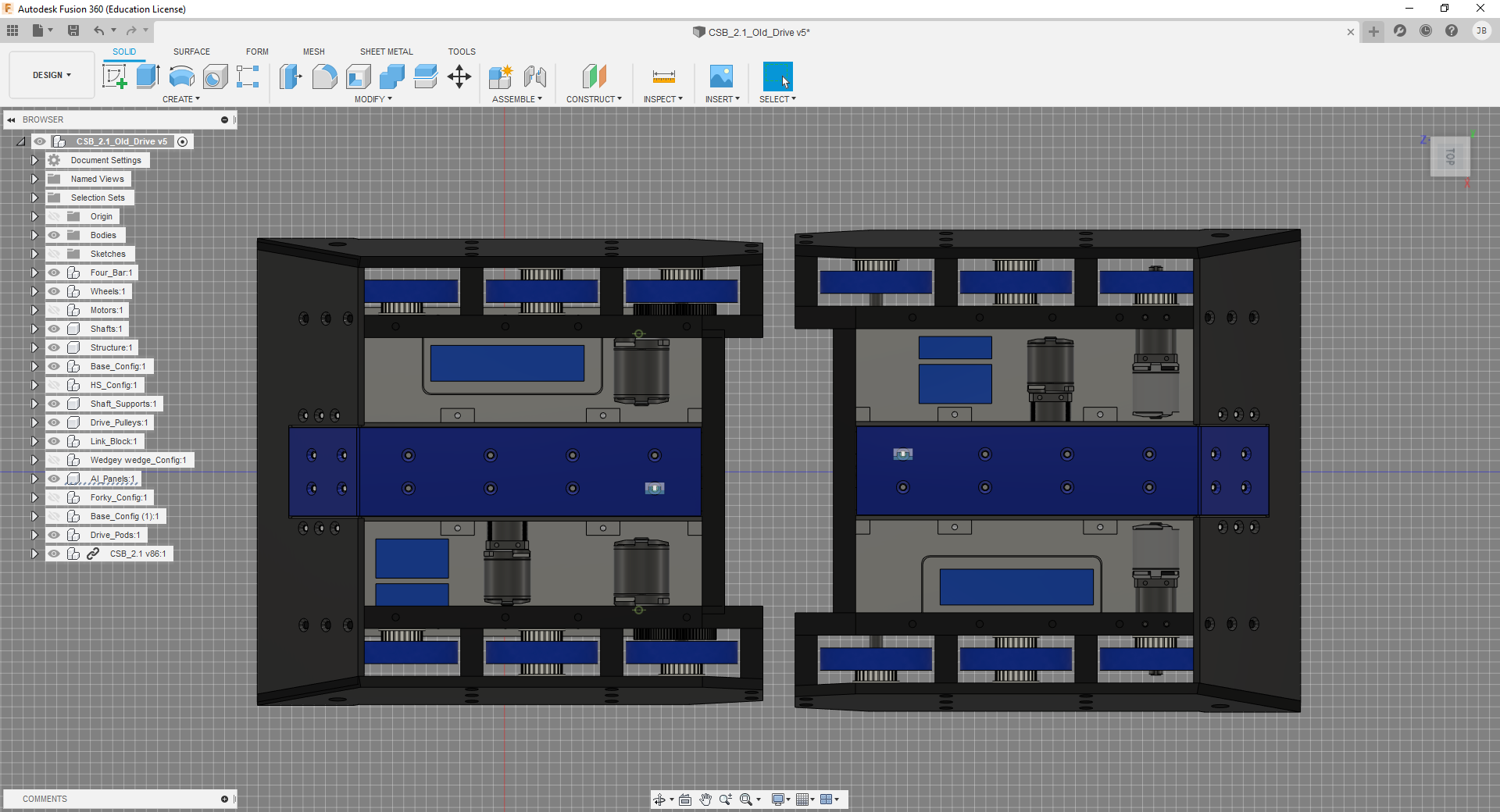
Updated CAD of CSB 2.1 trying out a version using the old drive set up and thicker side panels.
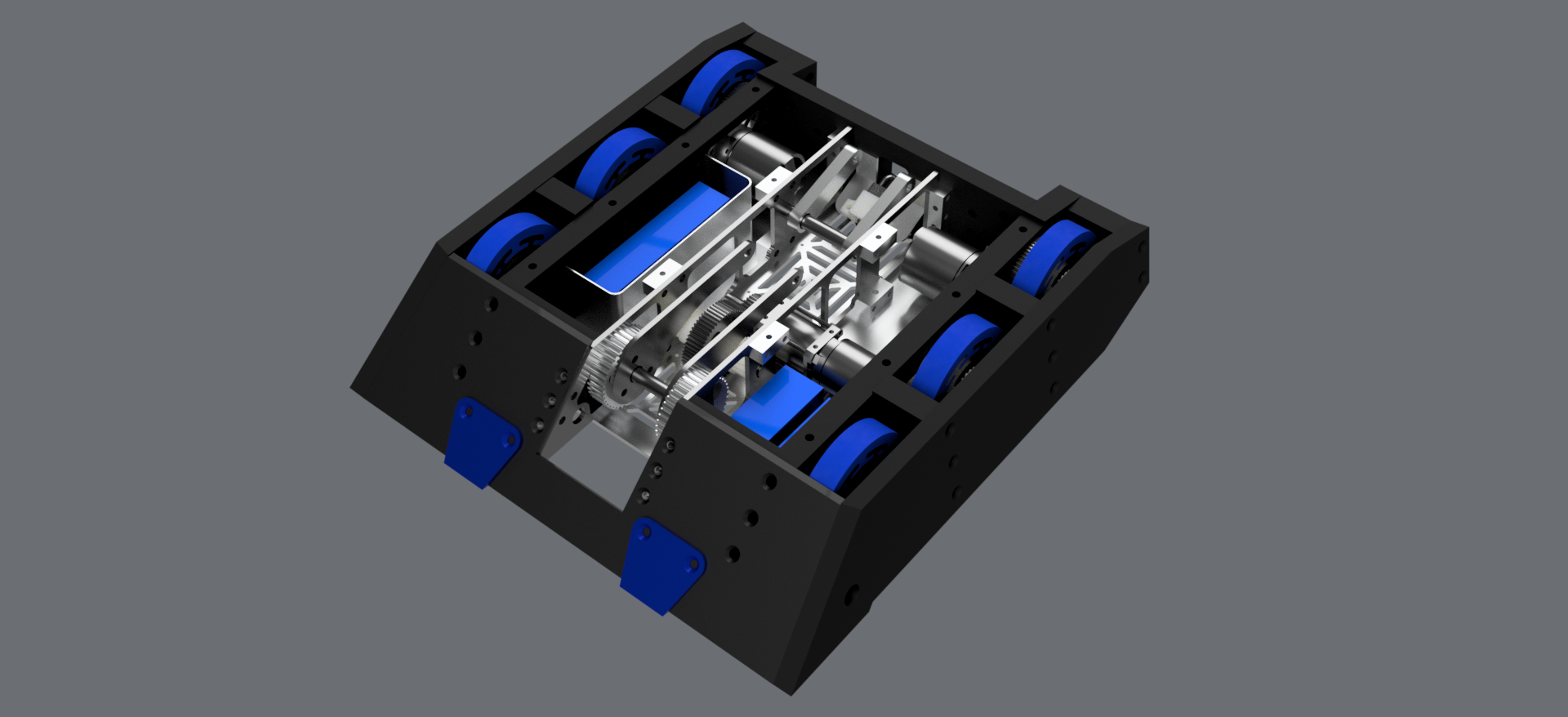
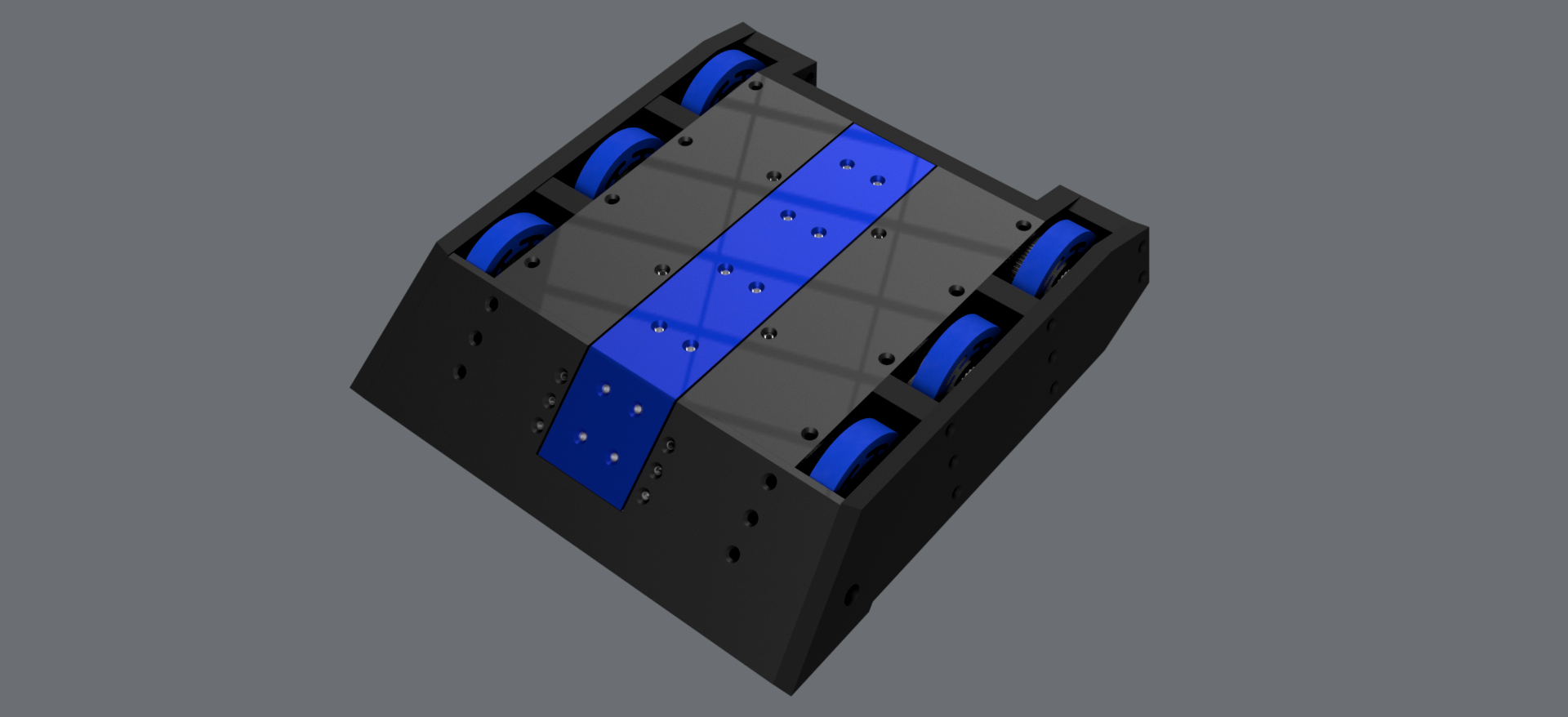
The two different drive setups. The left side is a copy of CSB 2.0's drive set up (propdrive 50-60 270kv with 5:1 spur gear reduction) and a possible new drive on the right.
Comment
-
tbh i would try to get the single stage to the frontComment
-
-
protects them more, if you have another neon style event you be able to keep driving tho without one set of wheelsComment
-
-
ONE YEAR LATER:
Whoops has been a while. Lots of progress has been made since my last post.
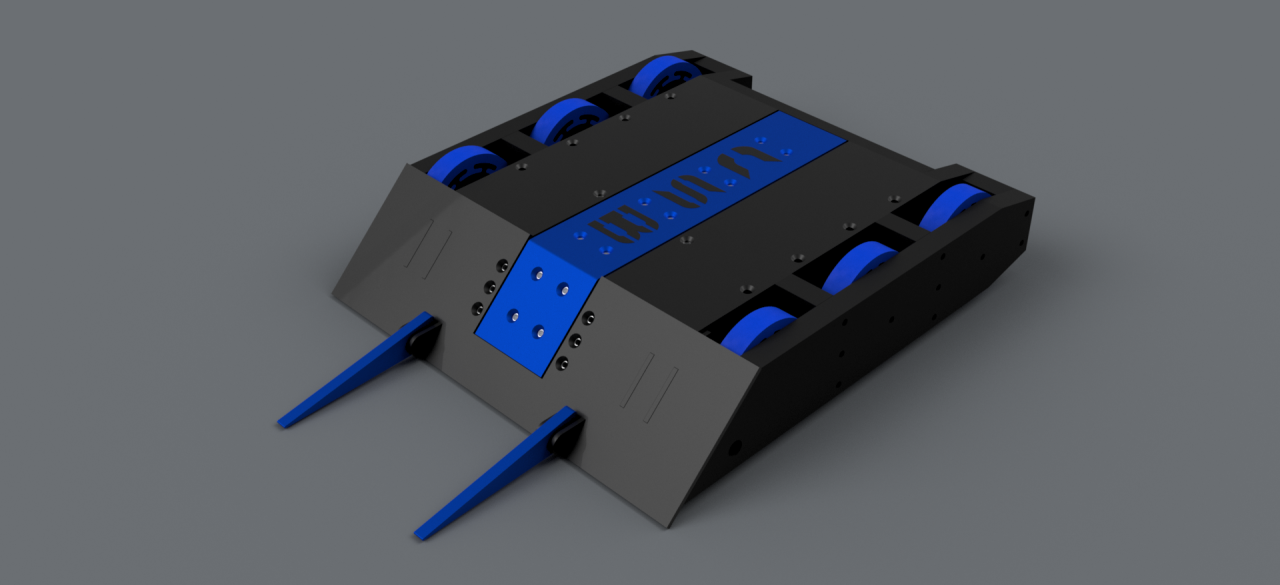
Starting off here is the up to date CAD of CSB 2.1, I revised the back so the back of the bulkheads are not sticking out so far. This has resulted in a Biteforce style back end. In the end I went with the brushless motor and BaneBots gearbox for the drive for simplicity of mounting it.
CSB_2.1_26.jpg
I've been ordering parts and materials since April and was slowly making the first parts of CSB 2.1
Starting of with the 20mm HDPE bulkheads. Progress was slow due to my time being dedicated to my Beetleweight CSB: Echo which was being readied for the Chatham Challenge Belt.
20210408_191026.jpg 20210412_131347.jpg 20210520_170018.jpg 20210527_162827.jpg
While working on the HDPE parts the Aluminium and Hardox panels arrived from EMSEA. I've opted to use Aluminium in place of hardox in select areas to keep the weight down. The 11:1 Banebots P61 gearboxes were modified so they could be face mounted with the Aluminium plates.
20210625_115841.jpg 20210625_115902.jpg 20210627_175739.jpg 20210627_175749.jpg
This was where I got up to before attending Chatham and moving in with my boyfriend a few weeks later.Comment
-
Post house move:
After moving Cumbria to live with my boyfriend work recommenced. The slot and tap approach to the weapon housing made the test assembly easier after fitting most of the old mechanism into the new robot. This time getting everything correct. With the bolts, nuts, etc arriving I could begin to bolt the robot together. Here you can see the Aluminium slots that help support the dead shaft attachment to the bulkheads.
20210808_162215.jpg 20210808_162222.jpg 20210816_160411.jpg 20210816_160418.jpg
I started making the side panel supports that also have slots to allow the drive belts to pass through.
With the threaded inserts attaching the dead shafts and lids was now fully possible.
20210818_142636.jpg 20210818_142745.jpg 20210820_115225.jpg 20210820_115229.jpg
The motors are ready to be mounted in place once the m5 nyloc nuts arrive. And with that you are up to date with the build the next step is make the side panels and refine their supports to get them to sitting right on the robot.
20210821_162621.jpgComment
Comment