 Tweet
Tweet
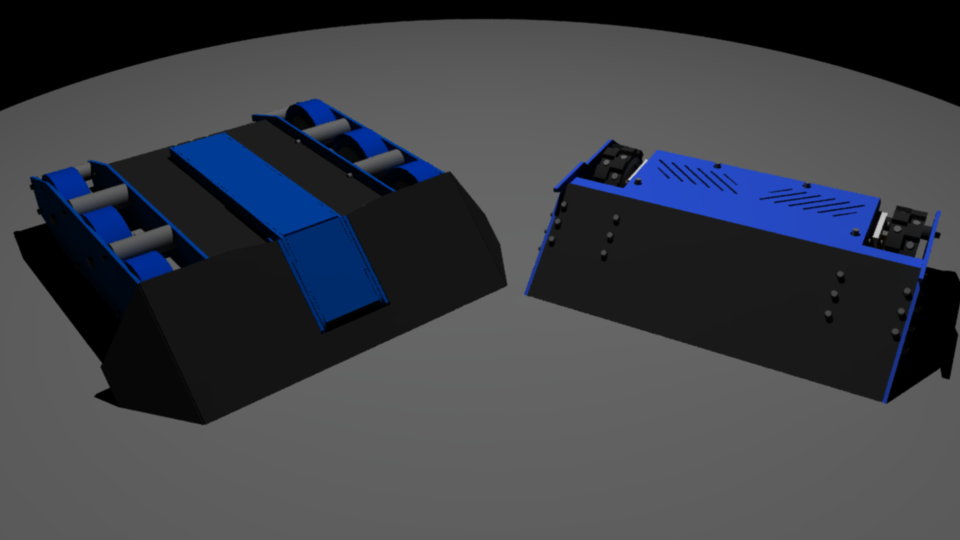
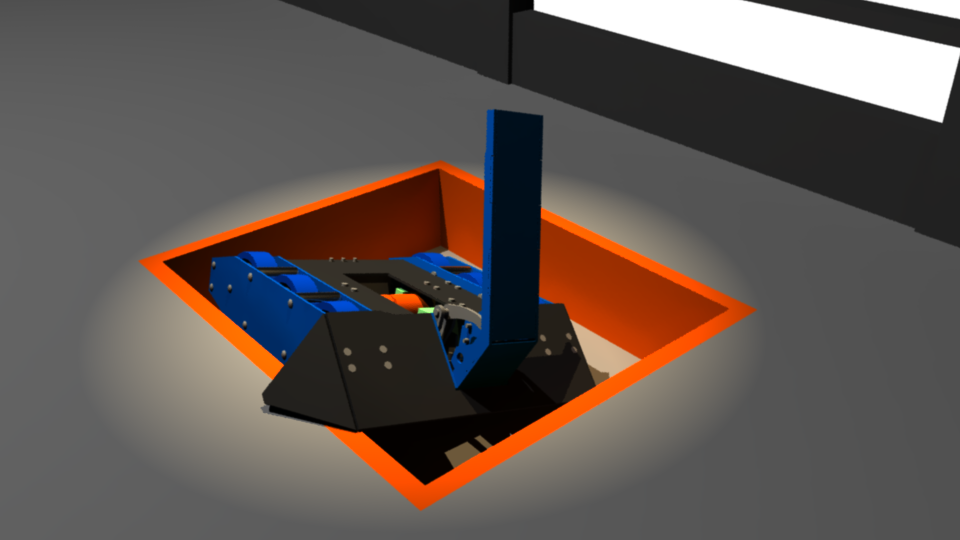
Another Pic with the top plate added. weapon motor and mechanism moved forward.

Thought process behind the design:
The robot as loosely mentioned before will use (hopefully) Brushless motors for drive and weapon using Saturn-16 like gearboxes with the weapon running on a higher gear ratio (64:1) before running a 2:1 ratio gearing for the final stage of the weapon mechanism. As for the drive I'd most likely use a standard gearbox, running the middle wheels directly off the gearbox while the front and rear wheels are run by drive belts. They may need the use of 3D printed wheel hubs with pulleys built in.
As for the materials, most likely some Hardox but the wedge might need to be made of a material that can have bolt holes countersunk so it is flush to wedge bots smoothly.
Thought process behind the design:
The robot as loosely mentioned before will use (hopefully) Brushless motors for drive and weapon using Saturn-16 like gearboxes with the weapon running on a higher gear ratio (64:1) before running a 2:1 ratio gearing for the final stage of the weapon mechanism. As for the drive I'd most likely use a standard gearbox, running the middle wheels directly off the gearbox while the front and rear wheels are run by drive belts. They may need the use of 3D printed wheel hubs with pulleys built in.
As for the materials, most likely some Hardox but the wedge might need to be made of a material that can have bolt holes countersunk so it is flush to wedge bots smoothly.
Comment