 Tweet
Tweet
Looks really professional 
-
-
thanksComment
-
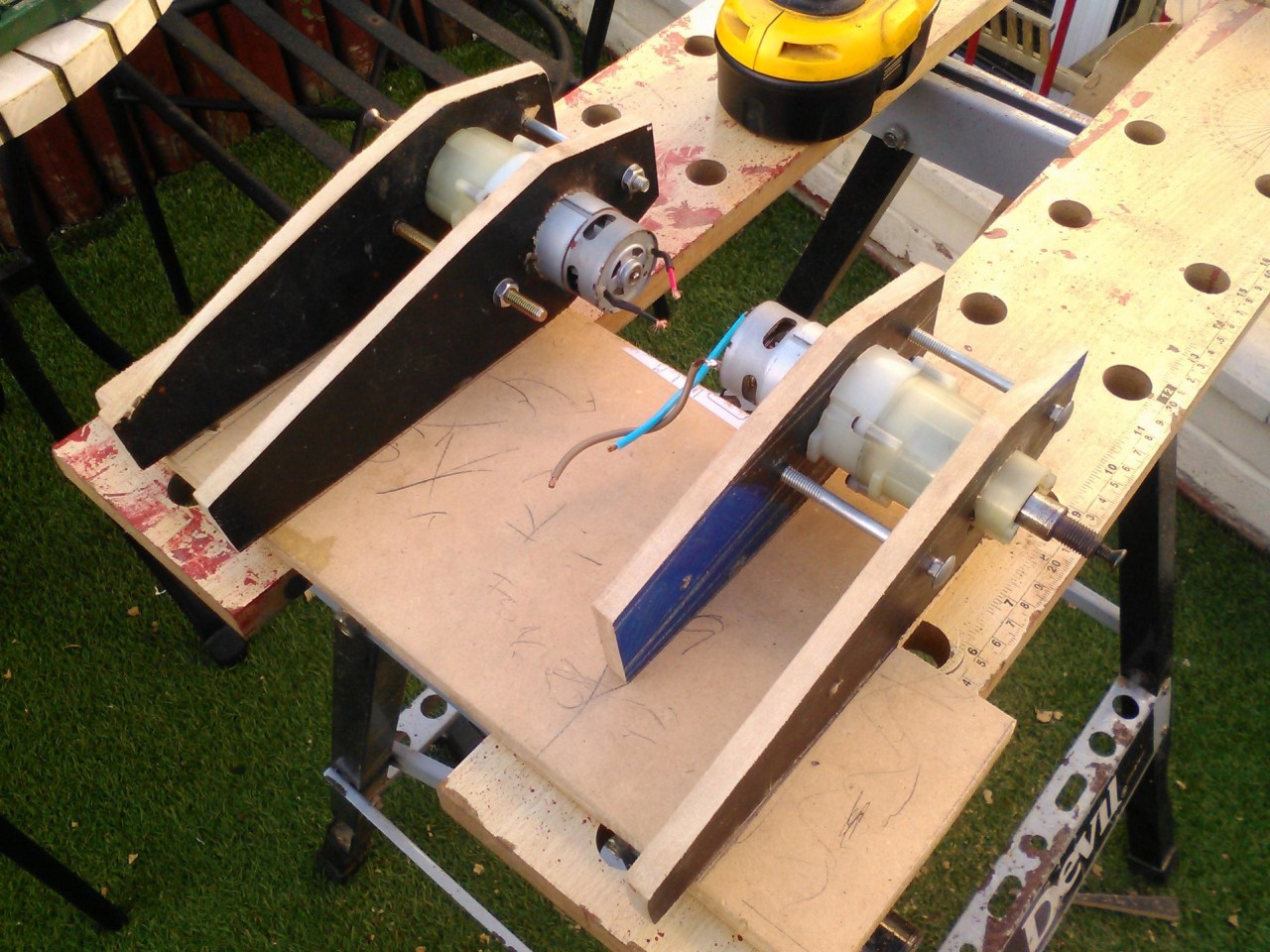
Did four hours of work to produce better motor mounts for my mock up of Wolf-E, now I'll just fit them to the base.
Comment
-
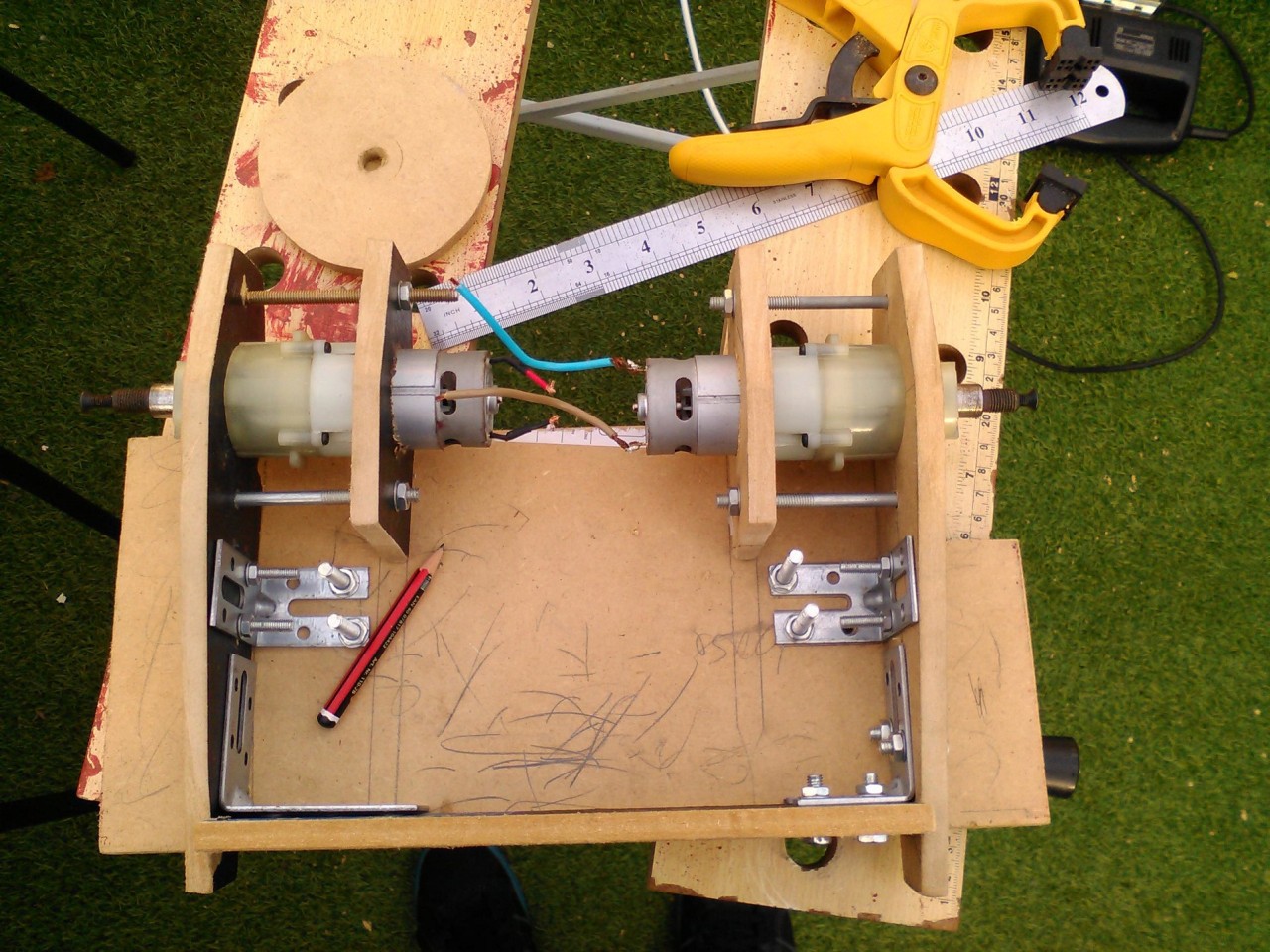
Just a heads-up, you can remove those 'flux guards' or whatever, those sleeves that fit over the motor. You just need to lift one side up near where the gap is and then pull them off, as they have a little nub on the inside which fits into the motor casing. Or you can leave them on if you want, it's up to you. I just find it makes it a little easier to mount the motors.
Comment
-
I tried to remove them once but failed. The sleeves actually help keep a snug fit on the mounts.
But thanks for letting me know.Comment
-
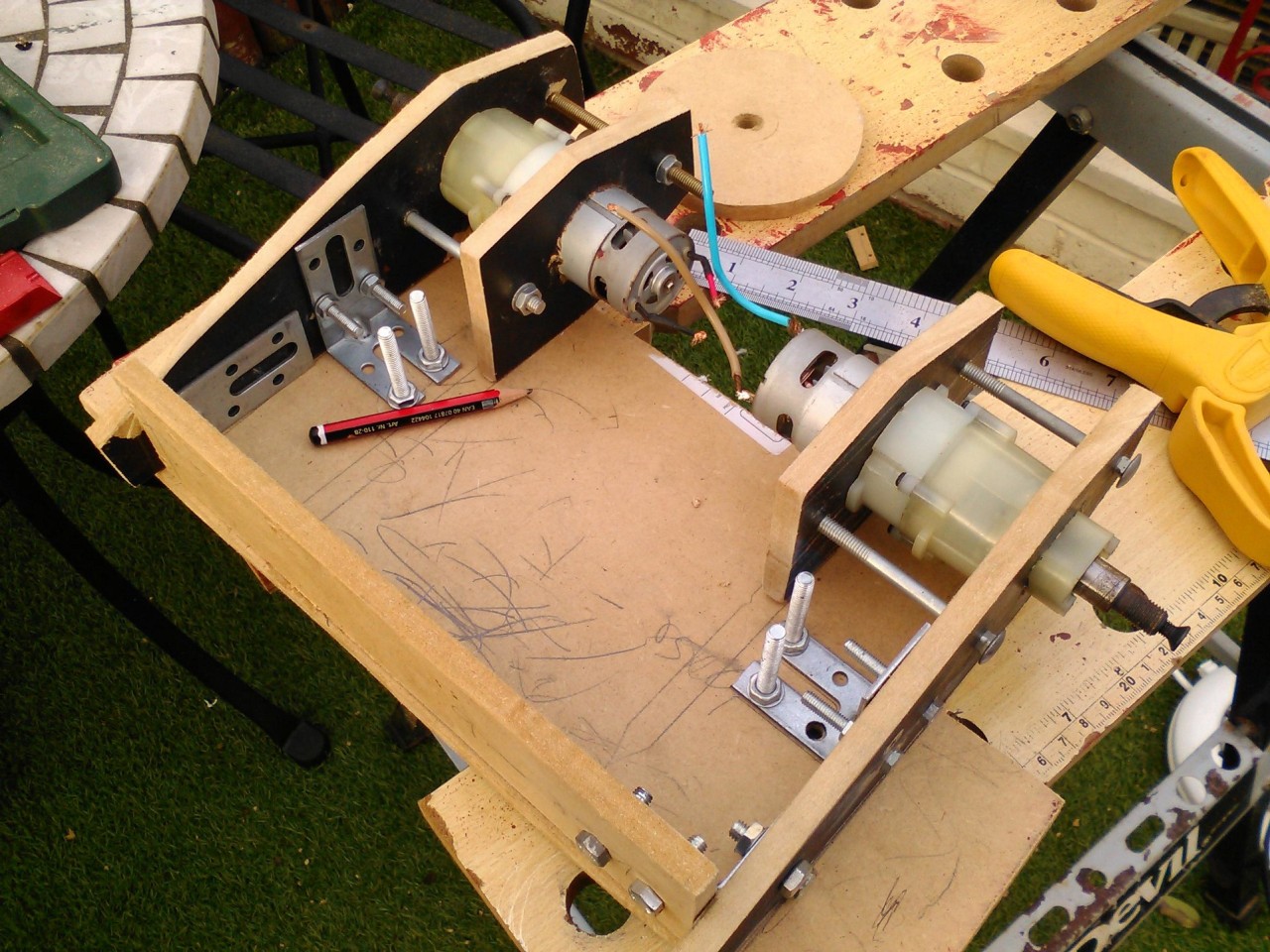
added the front cross section of the frame and attached the base to it. Might have to use a thiner base and top plate as it might beach the robot. Fun fact my step-dad thought that I was going to enter this in events, not realising this is the wooden prototype of Wolf_E.
Comment
-
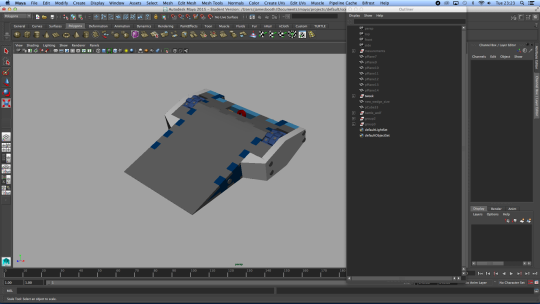
So after I made the mock up of Wolf-E I was able to better identify where the design was not working and I soon did a edit to the digital design. The main issue was that the frame was not fully designed with the method of how they was going to be bolted together.
Screen Shot 2016-11-06 at 01.42.36.pngScreen Shot 2016-11-06 at 01.47.48.pngComment
-
Looking good - so you've got an idea of where your attachment points are and what fixings you'll be using?Comment
-
Yes, I'll be using bolts with barrow nuts for the frame and another kind of nut for the wheel covers I still trying to find the correct name of. I added the placements to the design.
Screen Shot 2016-11-06 at 14.49.59.pngComment
-
Edited design so the frame to interlock with the top and bottom plates and made wheels with bike tyre treads.

Comment
-
Smoothing the wheel guards in will help with spinners if you have weight etc. The right angle will be easy for them to bite.Comment
-
I'll see what I can doComment
-
Although I'm not sure Wolf-E would be used at events with spinners anyway.Comment
-
-
Yeah or even more so. I just realised you may not even want to fight spinners so it doesn't matter. But if you look here on Beta can you see how it's just one smooth continuous angles and shapes? And how anything nasty trying to get at it would sort of deflect rather than chew? If it helps I can sketch something to show you with regards to your robot when I get home.
http://vignette2.wikia.nocookie.net/...20160517203923Comment
Comment