If this is your first visit, be sure to check out the FAQ. You may have to register
before you can post: click the register link above to proceed. Please email info@fightingrobots.co.uk if you have any questions.
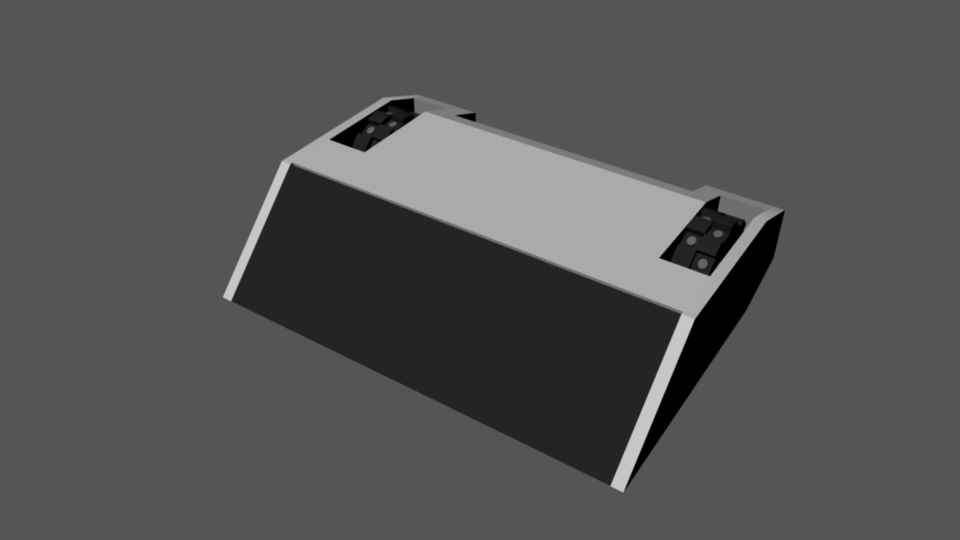
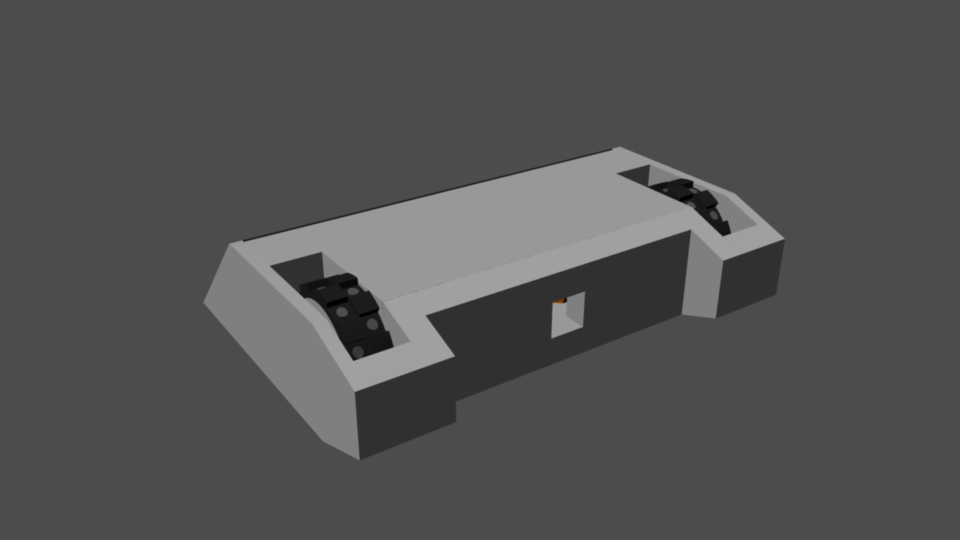
Finally made a new version of CSB's 2 wheeled design on the computer. In other news I got a sheet of 10mm thick HDPE for Xmas so when I get some new bolts and threaded inserts I'll hopefully have the HDPE parts of the body work finished sometime in the new year and then I'll worry about getting a Hardox panel for the wedge down the line.
not really solid given it's a test platform, the motors wobble slightly and the polycarb will not last long in battle so upgrading to the actual body made of HDPE is a must.
Forgot to post these, I’ve started making a cardboard mock up of the designed panels to get a sense scale with the electronics.
Also I've been wondering in regards to the 6 wheel robot design and it's weapon linkage, how does one attach a lifter arm to a shaft? and how do you connect that same shaft to spur gear?
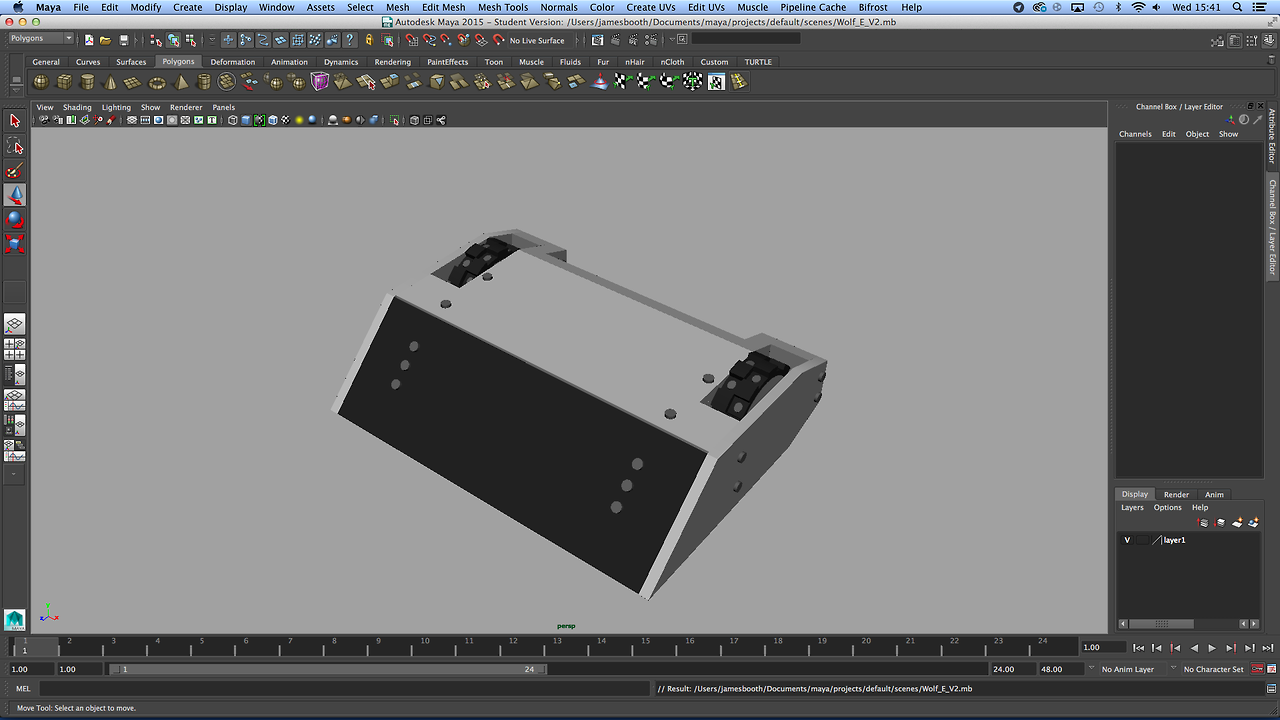
Just out of interest, what software are you using for your CAD?
This isn't a CAD software it's actually a animation and modelling software called Autodesk Maya. I'm only using it cause my Mac can't run Fusion 360 which has been recommended to me before. I know it isn't really ideal for the job but it works for concepts.
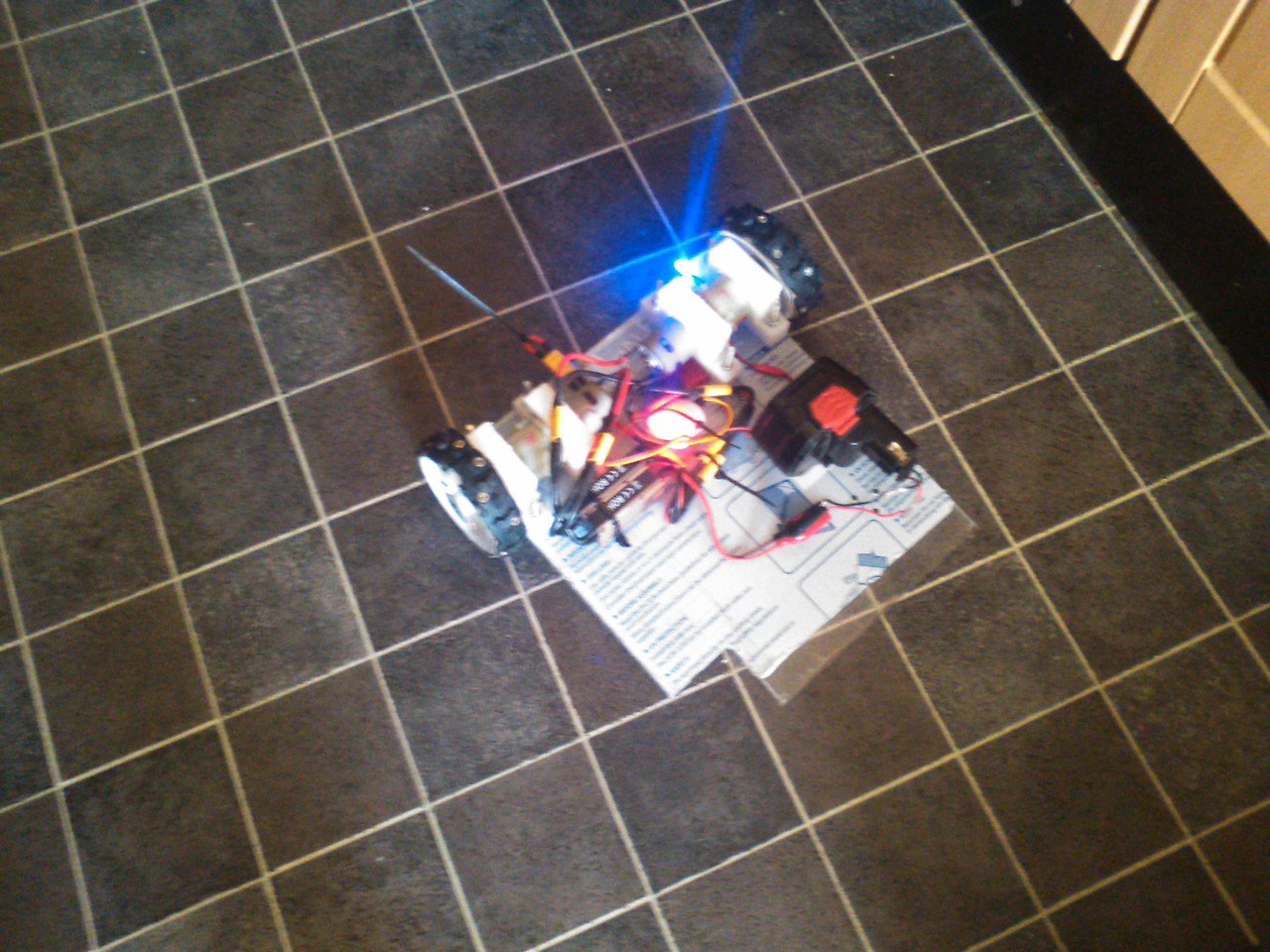
Finally got to film CSB/ Wolf-E driving in my kitchen. Even though it's not ready for the arena, I'm very happy to have something working and moving about at this point.
I already know about RoboChallenge's preference of active weapons, this version would be for live events and will gradually be upgraded until it reaches the more advanced design I have made of CSB.
If you go weaponless remember that not every event will accept you - Insomnia rejected my completely finished pusher in favour or builds that had barely been started.







 haha! Looks good none the less!
haha! Looks good none the less!
Leave a comment: