 Tweet
Tweet
It is a cool, unique robot and you did really well, well done!
-
-
The first machine from most people are huge. Conker and Tormenta were just plan massive! And Conker 2 was even bigger.Originally posted by RogueTwoRobots View Post
Superb first machine and great on the fly fixing after the damage from Binky. Lets see what Loki II can do :-DComment
-
A 4 bar lifter featherweight, something very close to my heart - brilliantly built, and as people are saying yes your first attempt is always bigger, the original Storm was huge, but as you get more confident everything can be shrunk down. With Storm II now we are literally playing for a mm here and a mm there inside the robot when we're making changes. Mike Lambert who made our latest gearboxes says he has a new-found respect for the robot ! You'll have to take a look at Storm II close up some time, maybe you can work out a way to replicate the way our lifter works ?
- brilliantly built, and as people are saying yes your first attempt is always bigger, the original Storm was huge, but as you get more confident everything can be shrunk down. With Storm II now we are literally playing for a mm here and a mm there inside the robot when we're making changes. Mike Lambert who made our latest gearboxes says he has a new-found respect for the robot ! You'll have to take a look at Storm II close up some time, maybe you can work out a way to replicate the way our lifter works ?
Comment
-
Wow thanks for all the comments and support guys, means so much
And thanks Ed would love a look inside Storm 2, I've seen the CAD of the arm mechanism, looks complex! I think gears and such are a bit beyond me at the moment but would love to learn.
Quick report on Yeovil.
I stuck the extra motors in to see if that would improve the drive in the arena. I then chose to fight Rango in my first fight. I powered it up in the arena and gave a little test and it sounded very grindy but decided to go with it. It didn't go very well. Drive was terrible and Ellis ran circles around me. He kept asking if I wanted to stop but I thought we'd put on a bit of a show for the audience and kept telling him to hit it. I called it off when the link came out. Got Loki back to the bench and one motor and seized up and another had snapped off from the gear box, that would explain it! Rango also broke one of the limit switches and made a bit of a mess of the HDPE. I stuck 2 new motors in and left the limit switch out so had to work the weapon by eye. Next up was Beauty 8 and Juggernaut.
Man Beauty 8 is fast! After stacking Beauty 8 against the side, it recovered and pushed me about. And then Loki decided to smoke. Pulled Loki out in case it was the lipo but opened it up and the battery was fine but had killed 2 more motors. Poo. I only had one spare left so I stuck that in. For some reason the lifter ESC wasn't working properly, it was being really slow. Tested the actuator on a drive ESC and it worked fine. Swapped Rx and still had the same problem so it's either the TX or ESC, haven't had a chance to investigate yet. Got it back together but went in weaponless to face....
Beauty 8 and Flow
unfortunately Flow's weapon wasn't working either so we were basically pushers against the no. 2 ranking robot. At one point Loki manages to escape the pit (don't ask me how!) after which Flow drove into it. Beauty flips me 360 and the lifter came apart (guess I didn't tighten the nuts enough :/ ). Beauty flips me onto his back, stacks me against the wall and then sends me OOTA.
After running flawlessly at the champs it was a bit disappointing to have so many problems but I guess I should consider myself lucky that it didn't happen at the champs. I had a great day besides that and was great fighting and meeting new roboteers.
Ideas for upgrades and being thought through. Will keep you guys posted
Comment
-
Have been playing around with designs for Loki 2: a low pressure pneumatic 4 bar with speed 900 drive and is smaller than the current version . May have stolen ideas from Ziggy....
. May have stolen ideas from Ziggy....
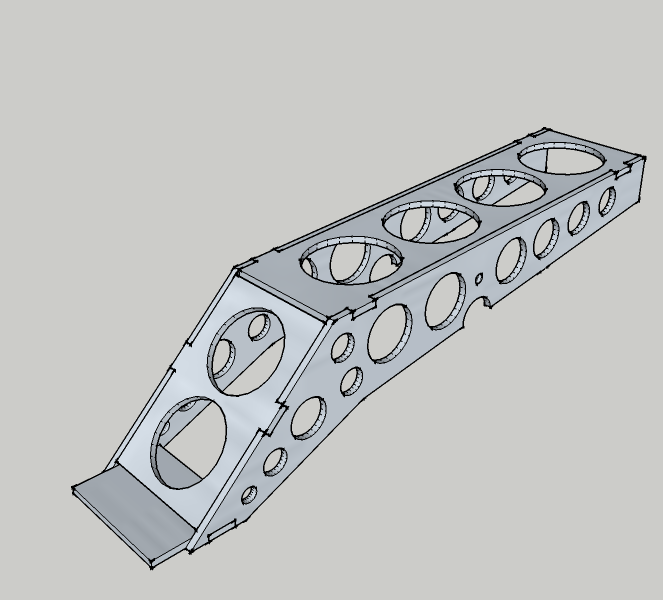
Design for the new arm. I'm thinking 5mm 7075 Alu (if I can source some), just want to get people's opinion one whether they think it will be substantial enough or if anyone's got any suggestions/improvements.Comment
-
7075 ali doesn't like to be welded.Comment
-
Will it be covered in anything? HDPE or ti or something over the top?
Also, why the s900 drive? It seems pretty pointless nowadays due to the lack of spares.Last edited by harry hills; 21 October 2014, 21:59.Comment
-
With a good machine, those motors won't be that vurnable, and wear isn't an issue.
The main thing is shock mounting, to avoid shattered magnets.Comment
-
Speed 900s can be pulled off but you need to shock mount them as Mario says - they're still extremely powerful motors, but you just need to make sure you keep them out of harm's way because you don't want to be replacing them regularly, if at all if you can help it.
A 4 bar flipper though, that'll be something very cool to see in the featherweight class. To be honest, I'm not sure whether you'd need aluminium for the arm, you could get away with Hardox if you've got a way to work that, but it's up to you of course. Only thing I'd be worried about is that arm taking a side-on hit whilst extended... I don't think that'll be something you'll get around easily, but it's something to bear in mind all the same I suppose!Comment
-
Don't bother with Speed 900's. They are dead as a drive system given there are no spares. If you want powerful drive then 775's are the next thing on the list. Some 16:1 Banebots with 775's on 18V will pack a punch and not weigh to much either.Comment
-
What Alex said; the Banebots / 775 combo works very well. You can't weld 7075 at all; it will crack as the welds cool. I would build it with titanium and maybe make it heavier at the front to resist spinner attacks.Comment
-
Tend to agree with Alex on the 900's. Have them on one of mine and they are really powerful but if one dies that's it. 16:1 Banebots with 775's on 18V look a good way to go (customs charges aside).
Tempted to try Banebot gearboxes with some brushless - probably more a packaging than power advantage (though the esc's are bigger)Comment
-
Have a hunt around for some 755 motor drills. Found some for Endeavour and they perform brilliantly! There also a lot cheaper than the BB ones (cost me the same amount to buy one BB as it did to buy two of the Makita drills)
Quick comment on the arm, would probably be best to make it out of hardox or something similar... if you have the weight! With all those holes you've cad'ed on that drawing, it looks like it should be OK.
Good luck with build, looks very promising
Comment
-
Ahh lots to reply to! Thanks for all your views
I've already got the 900s so I'll stick with them for now but thanks for the recommendations. What's the best way to shock mount the 900s?
I originally planned for have a Hardox arm but I can't seem to get it underweight so that's why I've opted for ally. 5mm ally arm weights 1071g and 3.3mm Hardox 1724g (if Sketchup calculates the area correctly!). What alloy do people suggest for the arm that will weld well?
And the arm will have HDPE on the front and top.
Another question, is it better to have a QEV directly on the ram and a tube to the buffer, or the buffer directly on the QEV and a tube to the ram? Or does it make little difference?Comment
-
The QEV can either be on the buffer or the ram. The most important thing being the distance between the them is as short as possible!
I like the look of the arm! Have you designed the rest of the robot? More pictures pleaseComment

Comment