 Tweet
Tweet
Originally posted by PaulusSmallus
View Post
-
Yeah I knew most of that, it just happens to be that my soldering iron was hot enough to do that. But thanks for the video though a handy reminder. -
I've made a big step on CSB today, the hardox wedge arrived from K-cut I just need to file the slots, tabs and holes smooth.

Comment
-
The front wedge has been welded and is currently having its paint dry.

Comment
-
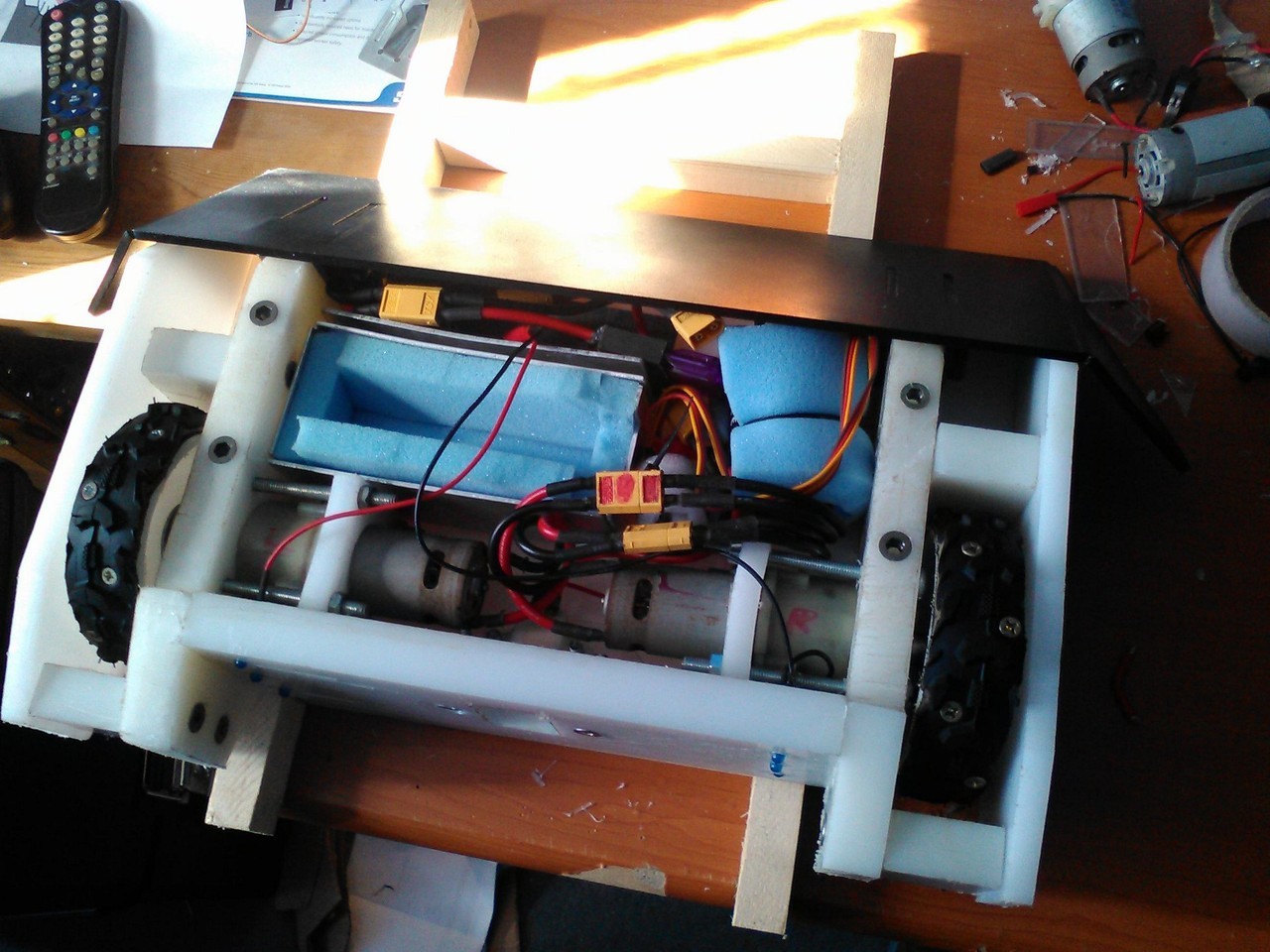
Today was a rush, paint dried, wedge bolted on, internals installed, battery charged. Tomorrow morning Coolspeedbot will be given a full test drive as a complete robot. Some little bits to do but CSB is basically complete.


Comment
-
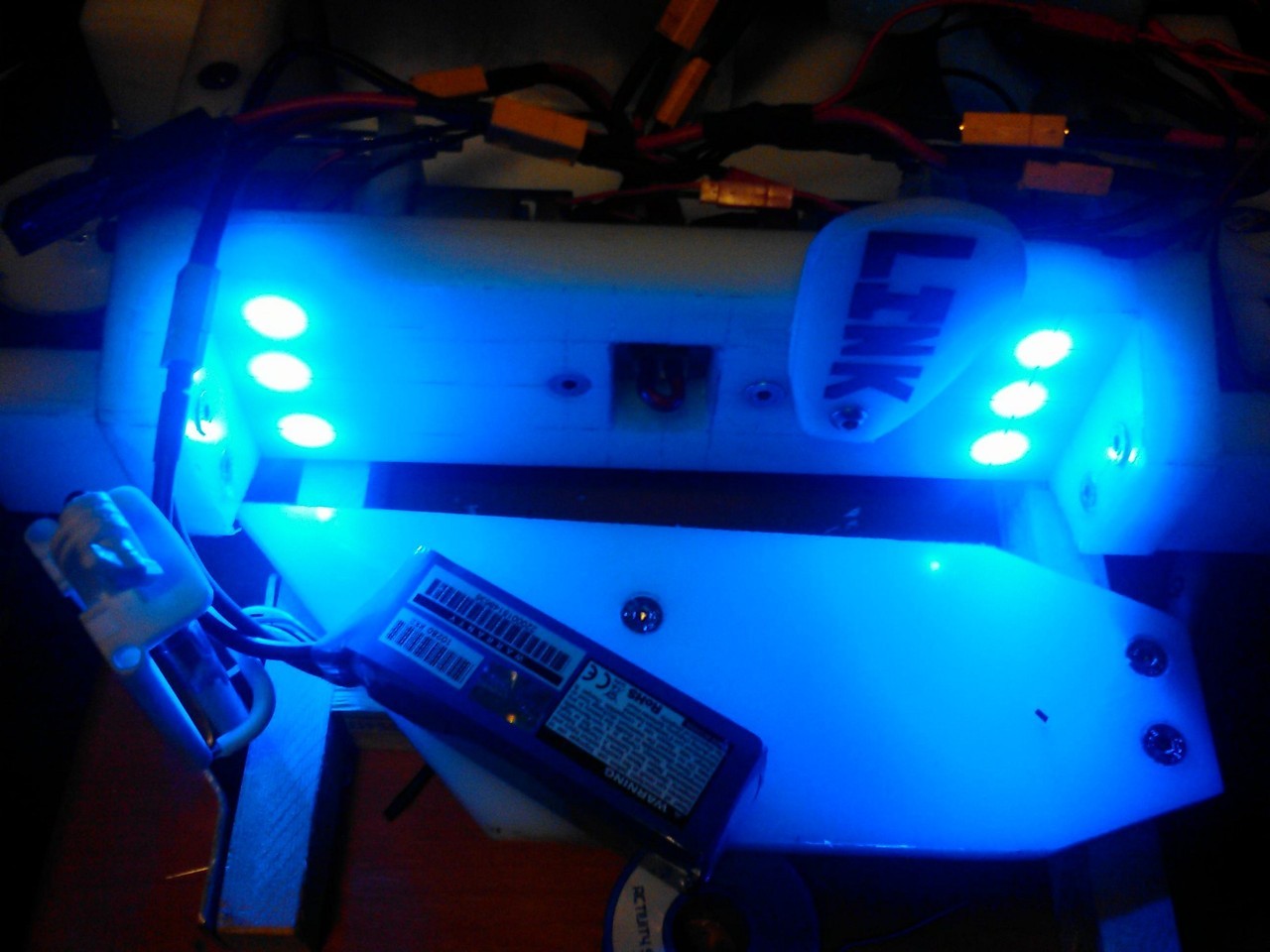
I recorded the test drive but I noticed that the lights were dimming when I gunned the drive. I did a bench test and couldn't understand why that is doing that. I then found that my motors twitch when I arm up plus there seems to be a clicking noise when I insert the removable link. any ideas why I'm encountering this?

Comment
-
Firstly, I am not an expert in building robots, so someone may have a much better suggestion.
LED dimming
When you put a lot of power into the motor (AKA gunning it), you will draw lots of current.
When the robot is on the floor, the motors have to do more work than sitting on a bench (its got to drive around and move its own weight when it is on the floor) so they will draw more current.
When you draw current from the battery, the voltage of the battery will drop due to its internal resistance. So it makes sense that your LEDs will go slightly dimmer when you are driving around. However, a LiPo battery has a very low internal resistance so I would guess it should be fine?? (someone with more experience may know).
What batteries are you using? Are you pushing their capabilities?
Thinking about it more, there could be a high resistance in a connector or solder joint somewhere between the battery and where the LEDs break out (this would have the same effect as resistance in the battery).
Motors Twitching
I am not sure why the motors would be twitching. Maybe try adding a small deadzone on your controller and see if it helps? (sorry for not being much help)
Mysterious clicking noise
When you plug in the removable link it may create a small spark between the contacts. This may be what you are hearing. Is it one click? Or a series of clicks?
Footnote: The spark is caused by the capacitors in your ESC charging up and drawing lots of current. You can get anti-spark connectors to stop it sparking (there are some XT60 ones, not sure about other connectors). In my experience, as long as you can't see a lot of black/dark areas in the contacts where it has sparked, you should be fine (if you see anything, you can always post a picture).
I hope this helps, just let me know if you want me to explain something better.Comment
-
Thanks for the response Paul, from what you and others on facebook have said. It looks like the motors are drawing some currentOriginally posted by PaulusSmallus View Post
away from the LEDs but has they still function fully when the robot is still they'll be fine.Comment
-
So after some thinking I felt that the light dimming needed to be addressed despite other roboteers on facebook saying it should be fine. And sure enough it was a simple problem and a simple solution. Basically the LEDs where under voltage due to running them in a series that required 19 volts and I'm running CSB on 16.8 volts at full charge from the 4cell lipo battery. In order to fix the issue I simply bought some resisters that could help run the LEDs in two parallel sets of 3 and after a afternoon of rewiring the LEDs CSB's lights barely dim and are far brighter now.
Comment
-
Our LED strips on Elevate were making so much heat we thought they would set the batteries on fire!Comment
-
-
New Side panels plus new top and base plates have been cut. The new side panels aid in the robot's manoeuvrability when it's upside down.

New wheels made to have better purchase on the ground as the old ones used to bounce and cause wheel spin.
The hubs made by Pre-Cut services.

Comment
-
This is it. Coolspeedbot is ready for Extreme Robots Maidstone. Everything is packed and ready to load into the car tomorrow morning. Then a 1 hour drive to Maidstone.

Comment
-
With Extreme Robots Maidstone over I did a write up on my facebook page:
https://www.facebook.com/teamcoolspe...261?__tn__=K-R
WP_20181028_002.jpg
The plan now is to strip down CSB and upgrade it to improve so the drive, manoeuvrability and add more weight as I've got 5kg left over.Comment
-
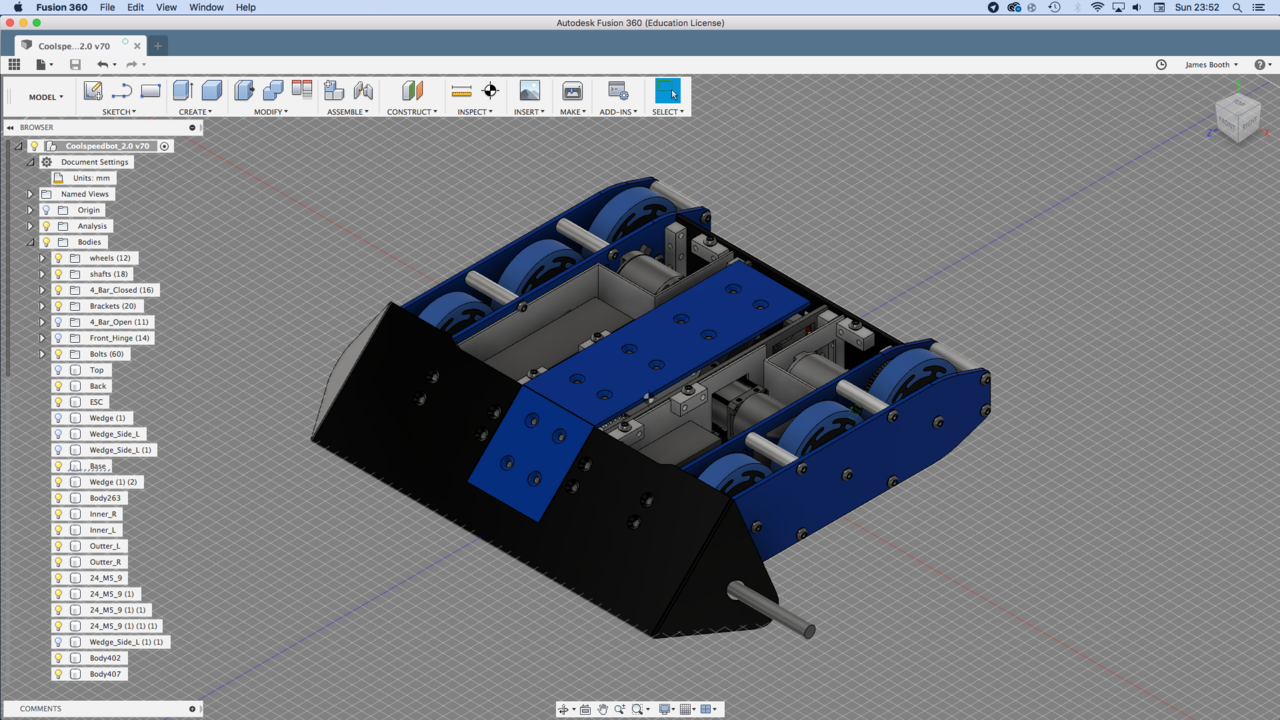
In the end it was more worth while retiring CSB and building a new version. Here is a preview of the CAD for Coolspeedbot 2.0. Going to try brushless drive and this will feature interchangeable lifter setups, a four-bar and a front hinge lifter. 2.0 is rework of a CAD idea I worked on last year.
Comment
-
Looks very nice.Comment
Comment