 Tweet
Tweet
I'm planning to run the same drive setup at 6S too on my new robot, I'm hoping they will take the extra bit of voltage ok, just need to make sure there is lots of airflow around them and it should all be fine  split batteries could be good if you have the weight and space for it, which I don't.
split batteries could be good if you have the weight and space for it, which I don't.
-
Last edited by Andy; 16 July 2014, 01:57. -
775'S on 16:1 with 124mm wheels with magnets wont be very reliable, without magnets its the same as drumroll i think, so should be pretty quick.... maybe a tad too quick for a vertical bar that big... you'll find turning difficult.
200mm radius.... 400mm OD? Pretty big! should be good.Comment
-
The initial design weighed in at a theoretical 12.6kg, with the 6S 5000mAh 50C Lipo and 16:1 gearboxes, assuming the weight of the bar to be in the realm of 3kg. This factors in everything, the weight of the belt and pulleys, the 20mm weapon shaft, bolts and 8mm ali motor mounts. With the bigger and slightly heavier 64:1 gearboxes and 2 5S 3650mAh packs instead of the monster 6S, it comes in at 13.1-ish, allowing a bit of room for error. This is the current layout in CAD:
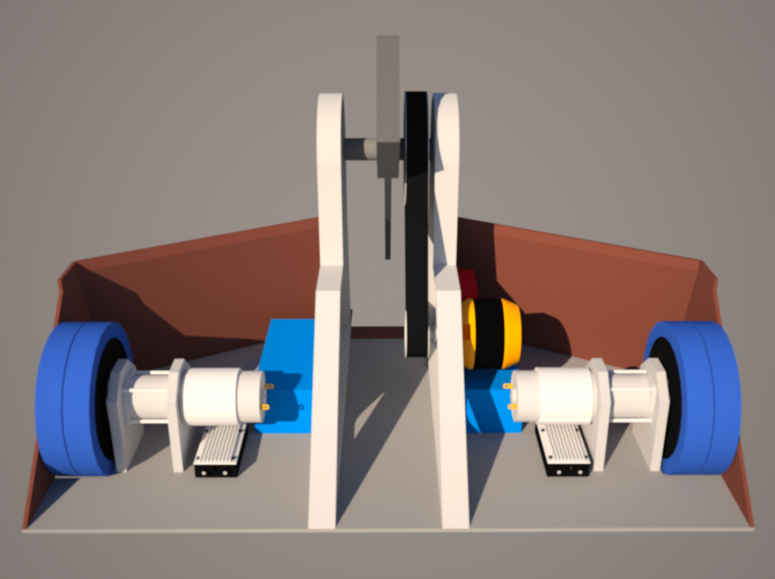
As you can see the two batteries and slightly longer gearboxes fit into the chassis easily.
I always design towards a goal of around 13kg so I have some spare weight for error and/or any modifications or additions that need making. On 10S the weapon ratio would need to be ~2.5:1 to achieve the 7000rpm desired. The 64:1 gearboxes will give a max speed of 5mph, which is a bit on the slow side but might come in handy in a pushing match, not to mention the added control it'll give.Comment
-
Cheers Nick! I hope so, I think with 60mm of bite and 3.5kg of bar, it may end up getting a few big hits! Just need to make sure everything's up to scratch when I build it to make sure it can take the force in the case of a really good hit... would hate for it to break itself!
I'm not too sure of the MOI of the bar, I'm sure that the weight is 3.5, though I may need to double check with Alex on that one...
That's a shame too, but I guess I could work with that. I always thought that it was that the motor always kicked out as much power as it had on tap, but efficiency and speed was dictated by the voltage... Might mean a slight redesign, I do like the idea of split voltage (seems to work great in Mr Mangle) so might be a route to explore. Failing that, I'm sure there could be other lower voltage motors to fit... could be a case of going for 5s and running it all off one beefy pack or something!
It might be a little bit fast too Dave, it's just a shame that Banebots don't really do anything between 16:1 and 64:1 reductions! Granted I could get smart with some belts and do a 16:1 with a 2:1 from motor to wheel, but I'm not sure that's the best way to do it... I could also have something custom made but I'd imagine that'd be pretty expensive and I've had it if a gearbox goes! It is indeed too, there abouts 400mm, should hopefully make a few nice dents! I'll see how reliable it is when it's built and how it handles, but I'm very tempted to drive this instead of HardWired 2 in next year's championships...
Thanks too Jarvis, that's a huge hand! There's plenty of space in it, so for once with my machines room isn't an issue! I'll have to watch the weight during the build naturally, but I reckon that'd work well. I'm still a little concerned about it only being 5mph but that might bring more benefits than having it go crazy fast on the 16:1s! I think if I can find a way to get it to more 32:1 territory that'd be ideal, but I feel that's going to involve more messing about than it'd be worth or expensive custom part territory, neither of which would be preferable!Comment
-
As a side note, does anyone know how much the import tax or whatever on the Banebots stuff is? I've never bought from the US before so it's still a grey area for me!Comment
-
I think banebots do a 4:1 gearbox, so maybe it is possible to combine this with the 16:1? Might be more compact than a belt system, not sure if its possible to combine them like this though..Comment
-
It could be managed if it came to it, though that'd give 64:1 I think, their 64:1 gearbox is three stages of 4:1 (the 16:1 is two stages of 4:1) so would just be better going for the 64:1 in that case, assuming I've got my numbers right!Comment
-
Yeah, my mistake - that would definitely be a better way of doing it lol, would it also be an idea to have the wheels further to the front to help stop gyro? I guess they can't go much further forwards whilst also keeping the robot invertible though, and not as much weight will be at the front to get under other robots.Comment
-
I could do but it then loses invertibility. Granted with a bar that big it'll probably get itself back over with that, but in a worst case scenario when I don't have the bar, I'd like to be able to push things about a little bit. I guess 4WD (with belts) could be a thing with some major weight saving but I can't imagine it'd help too much...
Tiny little bit of magnet downforce round the wheels and some driving practise might help solve the gyro-ing though! I think you'll always get it on vertical spinners like this, it's more learning to deal with it than negating it entirely I think... gyro effects shouldn't be too bad at lower RPMs and if I get a motor that allows for quick acceleration I'll just stick the power on when I'm lined up!Comment
-
If you want something mid, go for the 16:1 and an additional 2:1 reduction with some belts or something, will give the desired speed plus will limit the stresses on the gearboxes as they wont be in direct contact with the wheelsComment
-
That was an idea but I'm a bit worried about how it'd affect weight distribution, if I moved the motors back to fit a belt drive in there there'd be very little weight over the wheels, so it'd probably not drive so well, I'd assume...Comment
-
How thick is the bar? I can't see how that design weighs 3.5kg, as it looks quite thin. Also, a design like that looks menacing but the MOI for the weight will be quite low, as much of the mass is near the bore (in the counterweight).
A shape like this measures 200mm tip-bore and has an offset bite of about 17mm, but it would have to be more than 15mm thick to weigh 3.5kg... - could be made to look nastier, just an example. It could be mostly 10-12mm thick with thicker ends to bump up the MOI.
- could be made to look nastier, just an example. It could be mostly 10-12mm thick with thicker ends to bump up the MOI.
Can't see how the one in the CAD weighs the same? It looks like it's mostly 6-8mm thick?
Either way it will be nice to see a bigole vertical bar spinner, they're always intimidating!Last edited by Ellis; 16 July 2014, 18:56.Comment
-
This may be worth looking at as a banebots alternative- http://www.vexrobotics.com/vexpro/ge...planetary.html
Drumthing Else ran a pair for drive at Motorama with 775's iirc and the gearboxes seemed to hold up fine.Comment
-
A pair of ruggedized Gimson GR02's with 18V motors* and 36-1 gearratio will do well enough I think.
Put everything on 5S and simplify the logistics train a lot.
* 2500-3000 KV Brushless inrunners with 1/8" axles are a possible replacement for the original motors.Comment
-
@Ellis; The bar in CAD is quite possibly thinner than the actual design, Alex designed it and I roughly remade the shape with the same dimensions in the CAD. This may give a better idea:

@Mike; That URL gives me a 404 :/Comment
Comment