If this is your first visit, be sure to check out the FAQ. You may have to register
before you can post: click the register link above to proceed. Please email info@fightingrobots.co.uk if you have any questions.
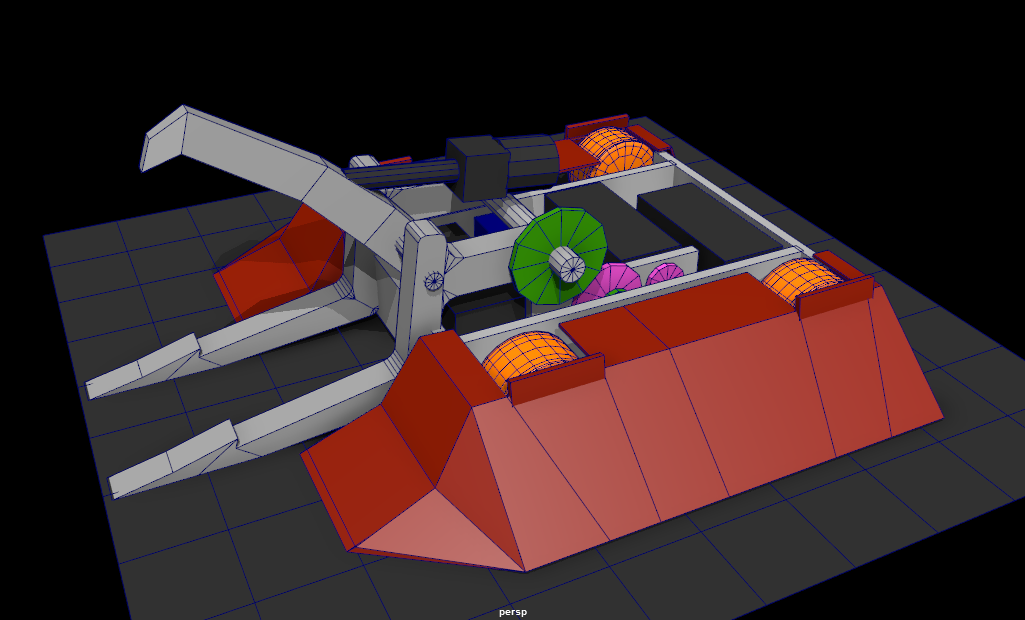
Yep. I use Maya for all my thinking/testing ideas before I make CAD files with proper dimensions in Inventor. Its just so much faster to make stuff and try out things.
I use it too but I don't have inventor to make a model using actual measurements, I even did a animation in Maya of my ant weight robot once.
It's okay. It's certainly not the best for designing robots though haha, just easy to use for me as its what I use at work each day. If you need a CAD program I think fusion 360 and 123D are all free and good enough for most uses.
Moving the motor to a horizontal position on top of the grabber. This will hopefully allow for a bit more rotation compared to the back mounted one in my printed prototype. I'm also planning to use a custom gearbox instead of a Saturn for the lifting arm, as I need something like 200:1 ratio for it to be effective.
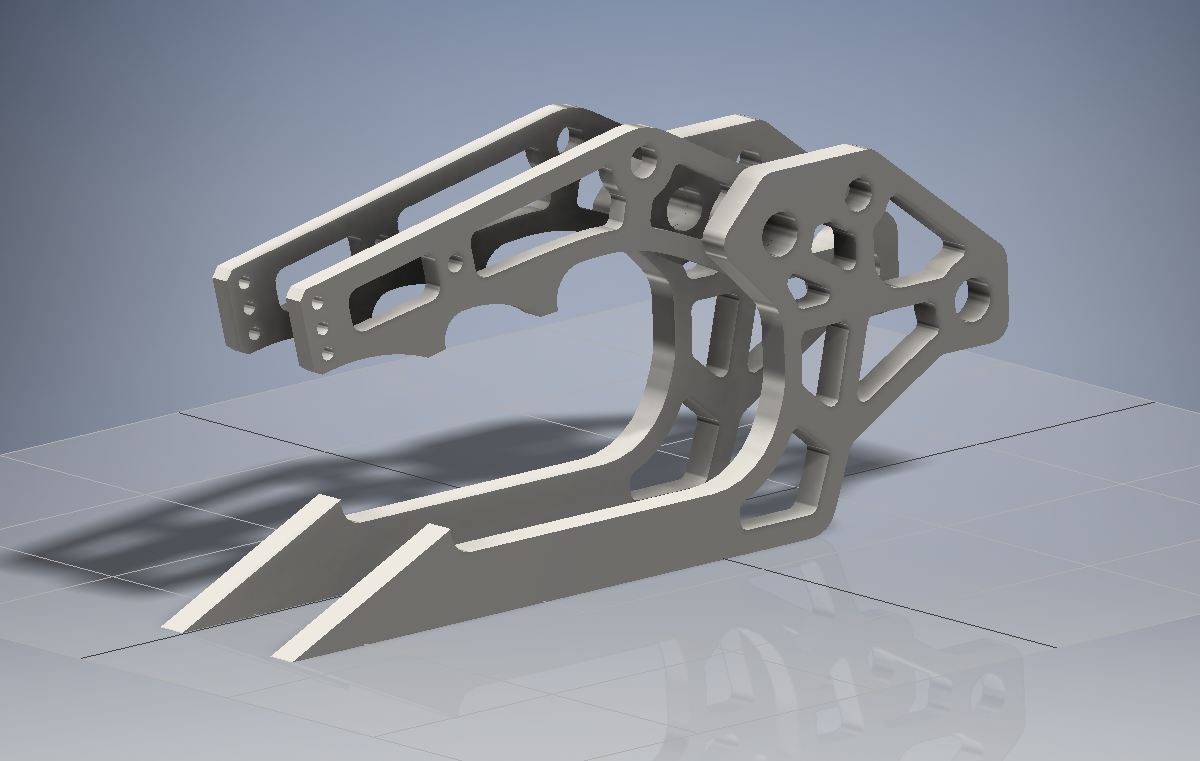
Full scale grabber prototype! This weekend I will try to 3D print mockups of the rest of the assembly to do some tests. Fits into Fissure's chassis via the spinner axle, so will use that as a test bed.
Ok, with a new contest coming up next month, its time to get this thing built!
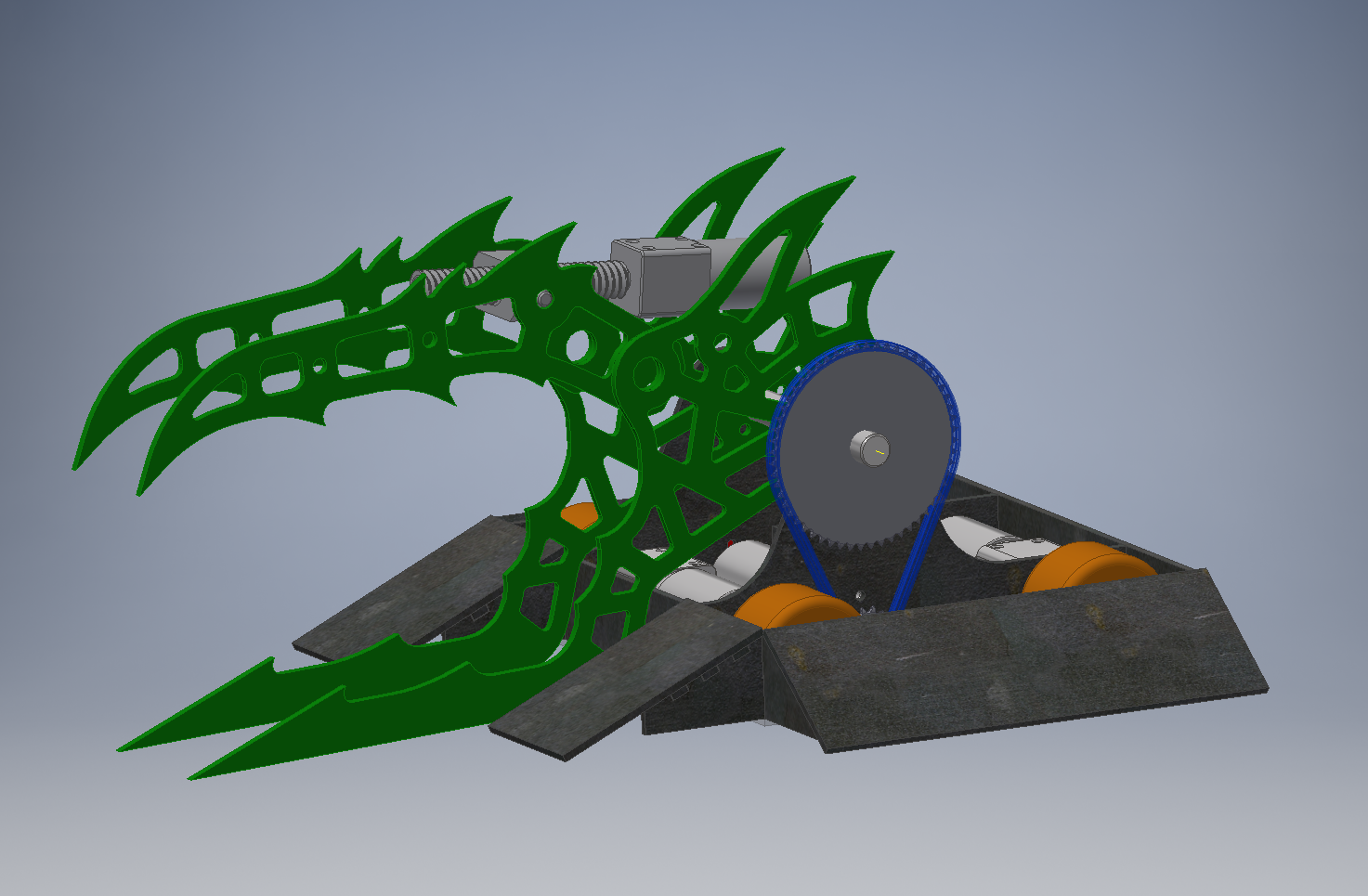
Here is my current cad file, complete with 100% stupid big claw thing. Will aim to finish up the cad side this week and then its onto sorting out hardox flatpack goodness.
Whole frame and claw is set to be 4mm hardox 500 at the moment. With a Ranglebox Neptune running the upper claw, a fat high geared motor running the lower claw, and a pair of Saturns running the drive.
ESC's will be TZ85's, reflashed, and moved into a custom made nylon case with a nice chunky heatsink and bus bar.
Well engineered?! HA! I have no clue what I'm doing, it just looks cool If it doesn't face plant instantly when lifting a proper load then I will be impressed.
 Tweet
Tweet
Comment