 Tweet
Tweet
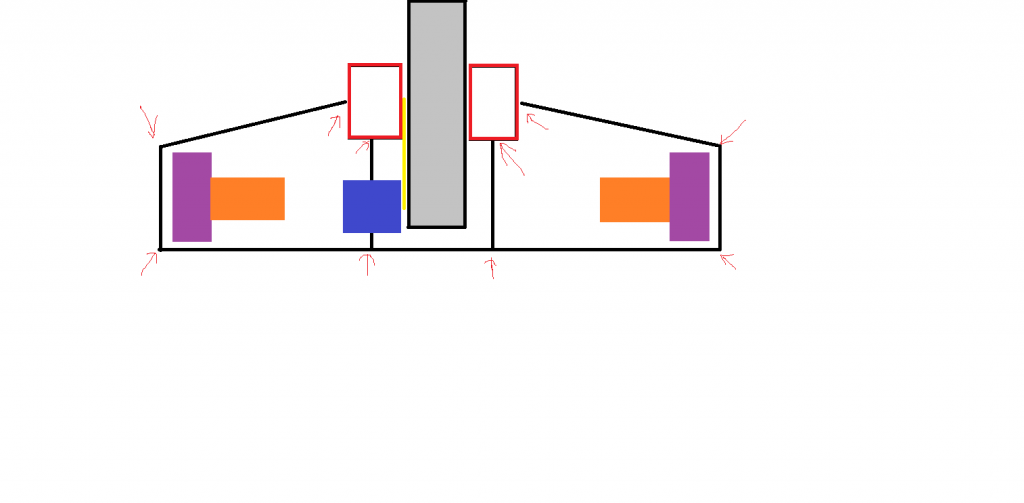
One thing I have picked up on is if you can use your base just to keep the wires etc inside then you can put the weight to good use. Try and make it so the base isn't a structural point, especially on a machine that's not invertable.
Also, if you know the amount of force in a full backlash you can determine the amount of metal needed. After a few talks with people I concluded its less to do with the thickness and more to do with the fact that someone will hit your weapon side on, then can your bulkheads take it?
Also, if you know the amount of force in a full backlash you can determine the amount of metal needed. After a few talks with people I concluded its less to do with the thickness and more to do with the fact that someone will hit your weapon side on, then can your bulkheads take it?
Comment