 Tweet
Tweet
ENEMY THY NAME IS HDPE SWARF!
Spent some time today on the chassis of the robot and Jayus what a mess!, there wasn't a wall, piece of floor or piece of my circular saw that wasn't covered in swarf.
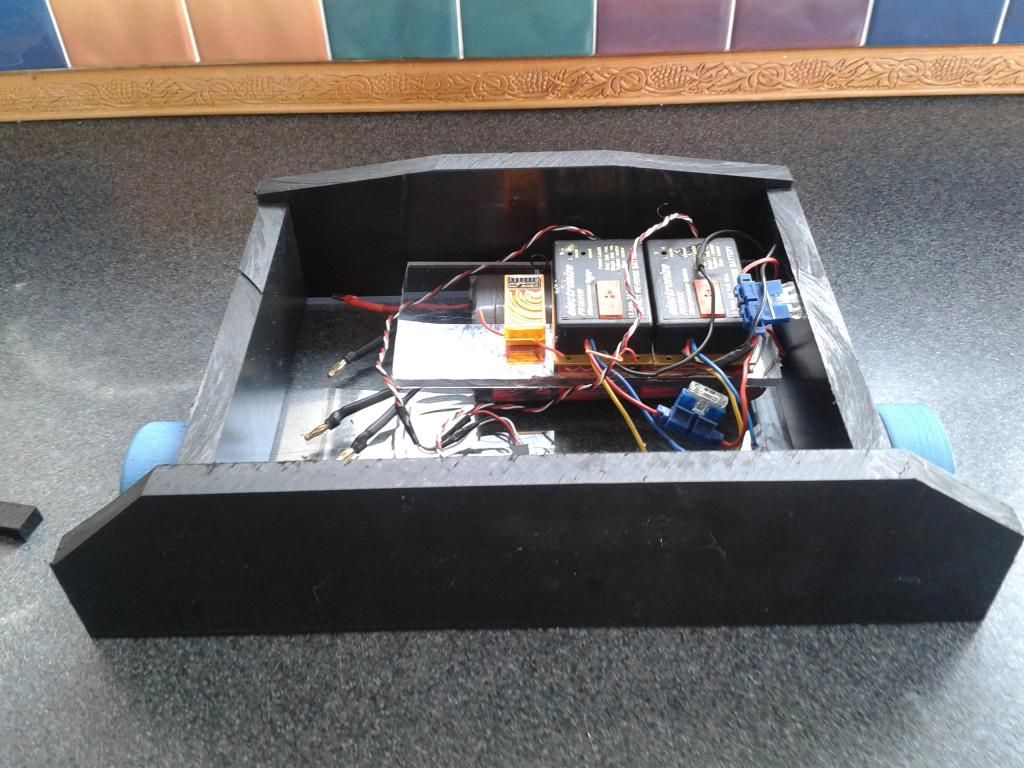
Anyway took some pictures of it stacked together thus far, still got the rest of the wheel guards to go and the motor mounts


Spent some time today on the chassis of the robot and Jayus what a mess!, there wasn't a wall, piece of floor or piece of my circular saw that wasn't covered in swarf.
Anyway took some pictures of it stacked together thus far, still got the rest of the wheel guards to go and the motor mounts
Comment