 Tweet
Tweet
After 12 years of following fighting robots, I'm now more determined than ever to actually get a robot into the arena. I've lost count of how many I've half built and given up on.
The target this time: get one to pass safety and fight in an arena. Nothing more. Entertaining is a secondary requirement.
I've got a week off work and I'm actually going to try to build two robots: One beetleweight and one feather. They'll both be similar in design so I'm aiming to get the beetle done, see how it works out, then build the Feather.
They're both going to be fairly similar to Ewan's robot's Fractal and Flux, but without the fun of tracks. No names at the moment, I'm hoping I'll get an idea whilst I'm building them. At the moment I've got the drive train working for the feather but no idea about the frame or weapon layout. I've got a rough layout of the beetle:
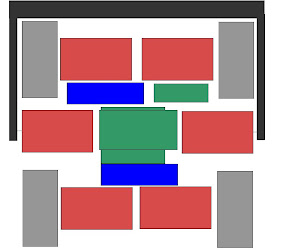
Component list:
3s 1000mAh lipo from Giantcod
4 x RE280 15:1 drive motors from technobots
2 x RE280 250:1 weapon motors from technobots
tamiya wheels
sabertooth dual 5A for drive
Polulu 15A for the weapon
Has anybody got experience with those components?
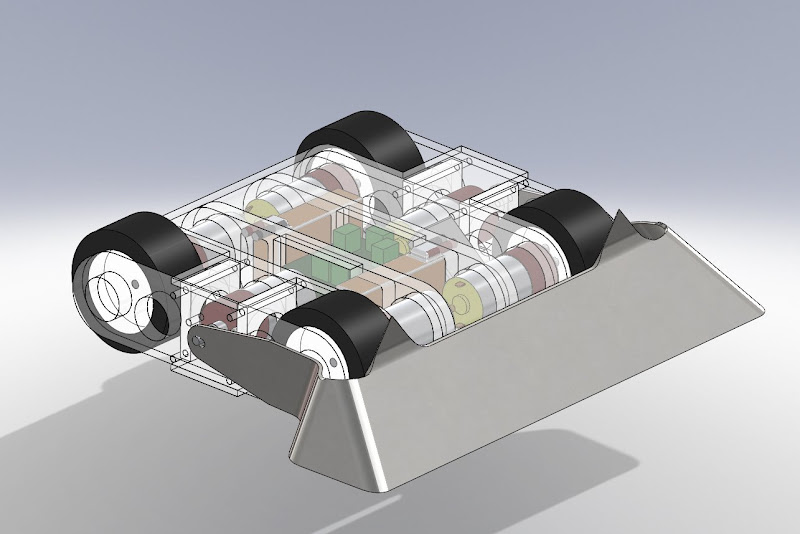
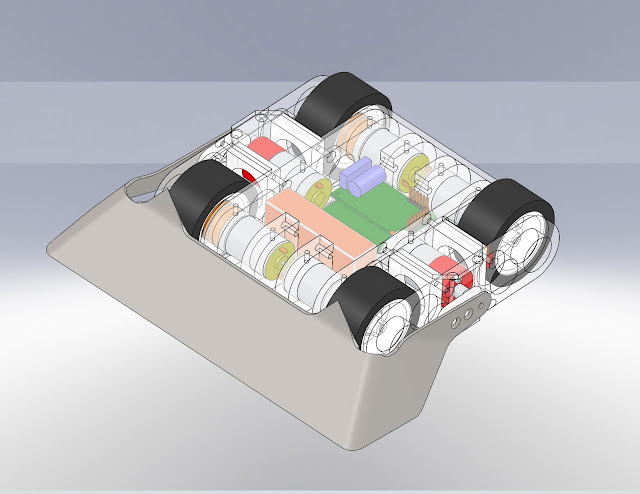
CAD drawings next
The target this time: get one to pass safety and fight in an arena. Nothing more. Entertaining is a secondary requirement.
I've got a week off work and I'm actually going to try to build two robots: One beetleweight and one feather. They'll both be similar in design so I'm aiming to get the beetle done, see how it works out, then build the Feather.
They're both going to be fairly similar to Ewan's robot's Fractal and Flux, but without the fun of tracks. No names at the moment, I'm hoping I'll get an idea whilst I'm building them. At the moment I've got the drive train working for the feather but no idea about the frame or weapon layout. I've got a rough layout of the beetle:
Component list:
3s 1000mAh lipo from Giantcod
4 x RE280 15:1 drive motors from technobots
2 x RE280 250:1 weapon motors from technobots
tamiya wheels
sabertooth dual 5A for drive
Polulu 15A for the weapon
Has anybody got experience with those components?
CAD drawings next











Comment