If this is your first visit, be sure to check out the FAQ. You may have to register
before you can post: click the register link above to proceed. Please email info@fightingrobots.co.uk if you have any questions.
The antweight world series in Reading. http://robotwars101.org/ants/antweightw ... /index.php
However you can bring it along to RR/RL events and use them in Dave Westons spinner arena
Damage from NST was only a broken belt really and a ding in the drum... was really happy with how it stood up in all honesty... it did its job and it won
however, when the belt got pulled of- it yanked on the motor shaft and bent the shaft very slightly... would still work...but i want to engineer out the weak point for next year, i will be totaly re-making the front end of brushless motor, changing the shaft from 5mm to 10mm and supporting it from the other side on bearings soon enough.
Id also like to keyway the pulley onto the shaft rather then just a grubscrew which kept coming loose.
360's disc worked well... but the upgrade to 6s has meant it kept cutting out... so the scorpion xxl will be going, and some botbitz will be going in.
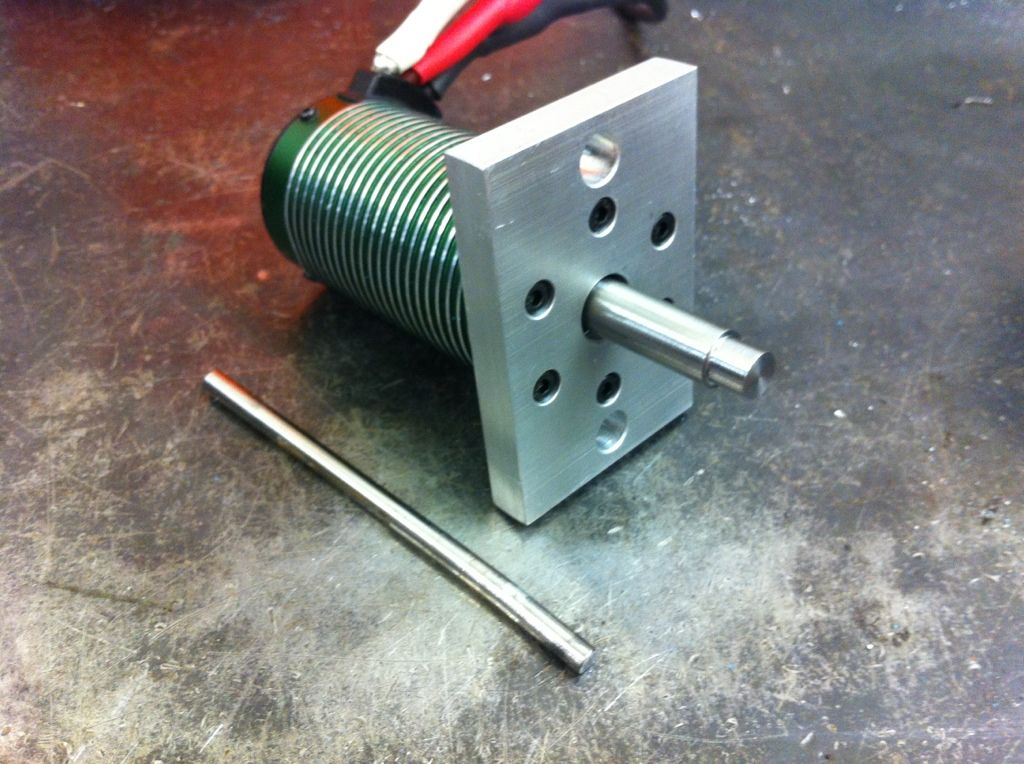
Designed a new front plate for the motor which keys into the motor can and acts as a mounting also, its held on with 6 bolts now as aposed to 3, ive also knocked out the shaft and made a larger diamater one which ill finnish of soon...
The front plate also has holes for the new M8 as aposed to the original M5 mounting holes, so i can tighten it right up;
next step is to put a keyway on it, and assemble it fully- theres no rotor internally in this picture... then ill be putting a support bearing in the bulkhead of 720 and mounting a new pulley to the shaft... i cant see this new assembly falling apart.
Old shaft next to it for referance... Thanks to Dennis for machining the aluminium.
What does the faceplate mount onto in the can? Just wondering how you managed to double the amount of bolts from 3 to 6. Or was there enough 'meat' in there for you to just tap out 3 more?
Looks good though! Are you going to support the rear of the motor also?
I would happily pay to have that mod done to the brushless that is going in Conker 3, cos then I would be almost certain that it would never break! Still cant choose between the Sensored Inrunner or the standard Outrunner...
Both would do the same top speed and the sensored element should allow the in-runner to match the spin up time of the out-runner despite it having less torque.
PJ- theres not much point in supporting the back, as theres no shock going through it, the 6 bolts on the front are only to stop the can falling of through vibration now really... as the shaft will be supported on both sides, all the force just goes into the bearings...having said that i might be putting an armour mounting plate in that kind of area anyhow so i might kill 2 birds with one stone just to stop the motor ever being able to fall apart even if all the bolts should fall out.
Alex- id probably go with the scorpion just because its a good motor out of the box.... and just because a motors an in runner... doesnt mean the spinup time will be pants... look at 720/galactus for examples of that.
If your going to the trouble of getting your bulkheads machined from alu like you showed me before- id suggest making your mounting for the motor the same as the one i made for 360 ages ago... so it supports the entire front cap of the motor, with its own bearing.
 Tweet
Tweet

Comment