 Tweet
Tweet
I've been thinking about building a robot for a while now, but i will admit the repeats of robot wars extreme on dave (i have seen this discussed on here and am also happy with the increase of intrest) have turbo charged the effort somewhat.
Basicly i've done some simple designs so far and my team mate is set on one which im convinced wont work, and even if it did would be unusable due to the whole heavyweights with spinners thing (which i do understand, but it dosent stop me from being abit sad about it )
)
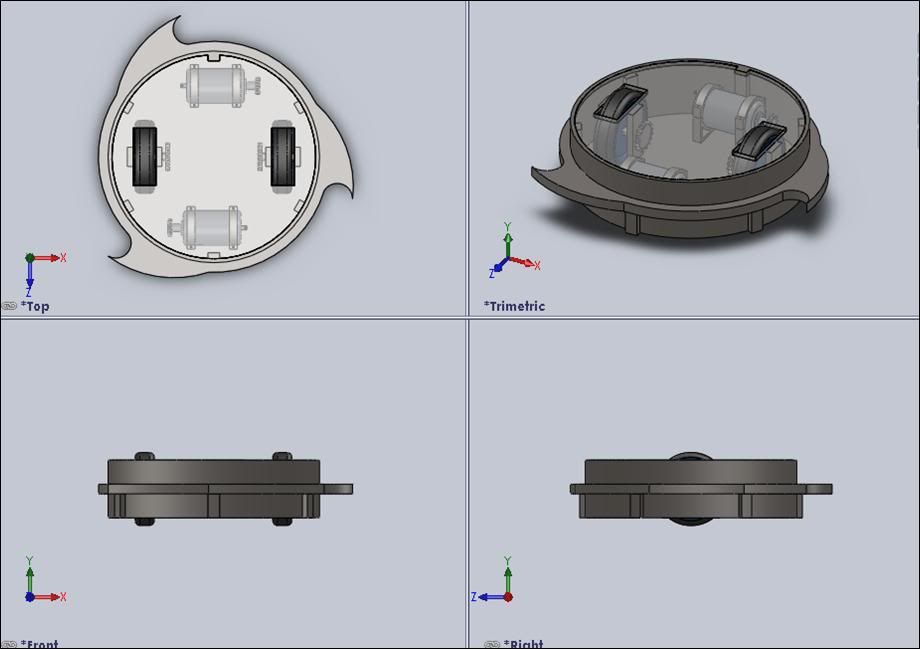
The idea is because we like spinners and as they can't be used currenty my team mate decided to try and find away around this..... So we've ended up with a design where (and i am reluctant to call it a full body spinner) there is a fixed disk and the idea is to have both wheels running in opposite directions to make the entire robot spin, the reason i don't like this is i doubt we would be able to get the robot up to a speed where it could do any damage, and even if we could, would then be classed as a spinner.
I have been unable to convince him of this so i would be grateful if some experienced roboteers could post their opinions of this, otherwise we could be undecided on what to build for a long time (however i would be just as gratefull if you guys prove me wrong)
Also could we avoid the topic of heavyweights being a bad idea for first timers to build as i have read that advice and decided to completly ignor it as i think we are up to the challenge, if we find we're not we'll put it on hold and build one for a lighter weight class!
Basicly i've done some simple designs so far and my team mate is set on one which im convinced wont work, and even if it did would be unusable due to the whole heavyweights with spinners thing (which i do understand, but it dosent stop me from being abit sad about it
The idea is because we like spinners and as they can't be used currenty my team mate decided to try and find away around this..... So we've ended up with a design where (and i am reluctant to call it a full body spinner) there is a fixed disk and the idea is to have both wheels running in opposite directions to make the entire robot spin, the reason i don't like this is i doubt we would be able to get the robot up to a speed where it could do any damage, and even if we could, would then be classed as a spinner.
I have been unable to convince him of this so i would be grateful if some experienced roboteers could post their opinions of this, otherwise we could be undecided on what to build for a long time (however i would be just as gratefull if you guys prove me wrong)
Also could we avoid the topic of heavyweights being a bad idea for first timers to build as i have read that advice and decided to completly ignor it as i think we are up to the challenge, if we find we're not we'll put it on hold and build one for a lighter weight class!

Comment