If this is your first visit, be sure to check out the FAQ. You may have to register
before you can post: click the register link above to proceed. Please email info@fightingrobots.co.uk if you have any questions.
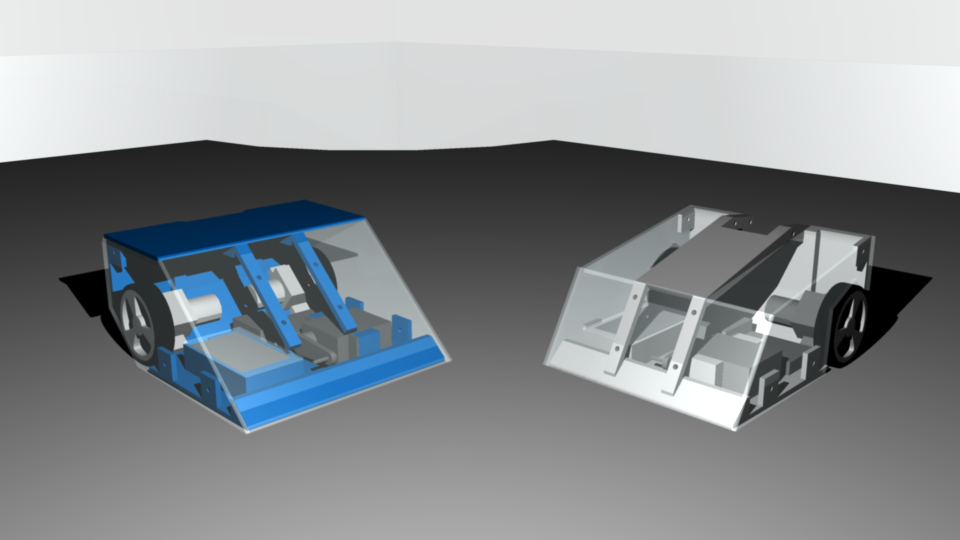
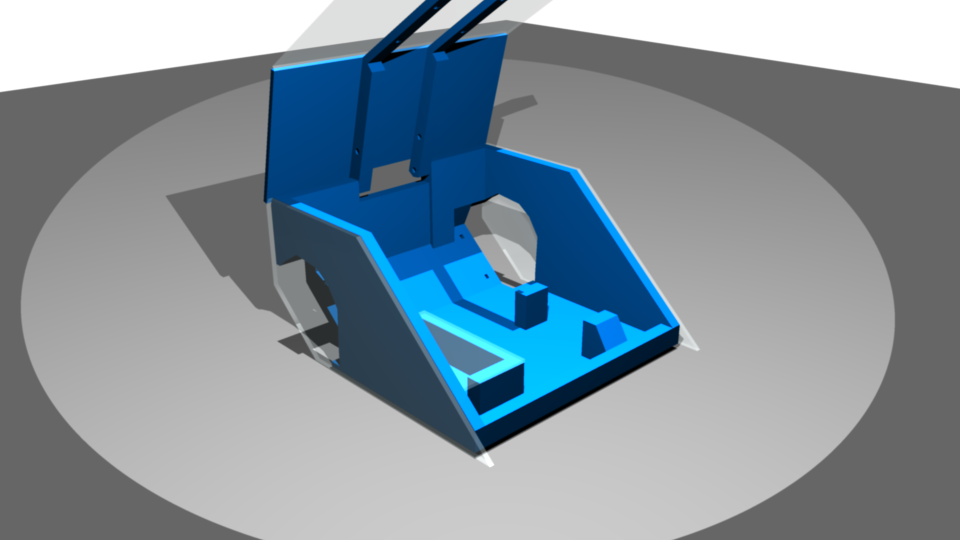
Trimmed the wires on the ESCs now just need to fix the receiver down and switch to the lipo battery. did a test run, Killer-Wolf is nearing completion.
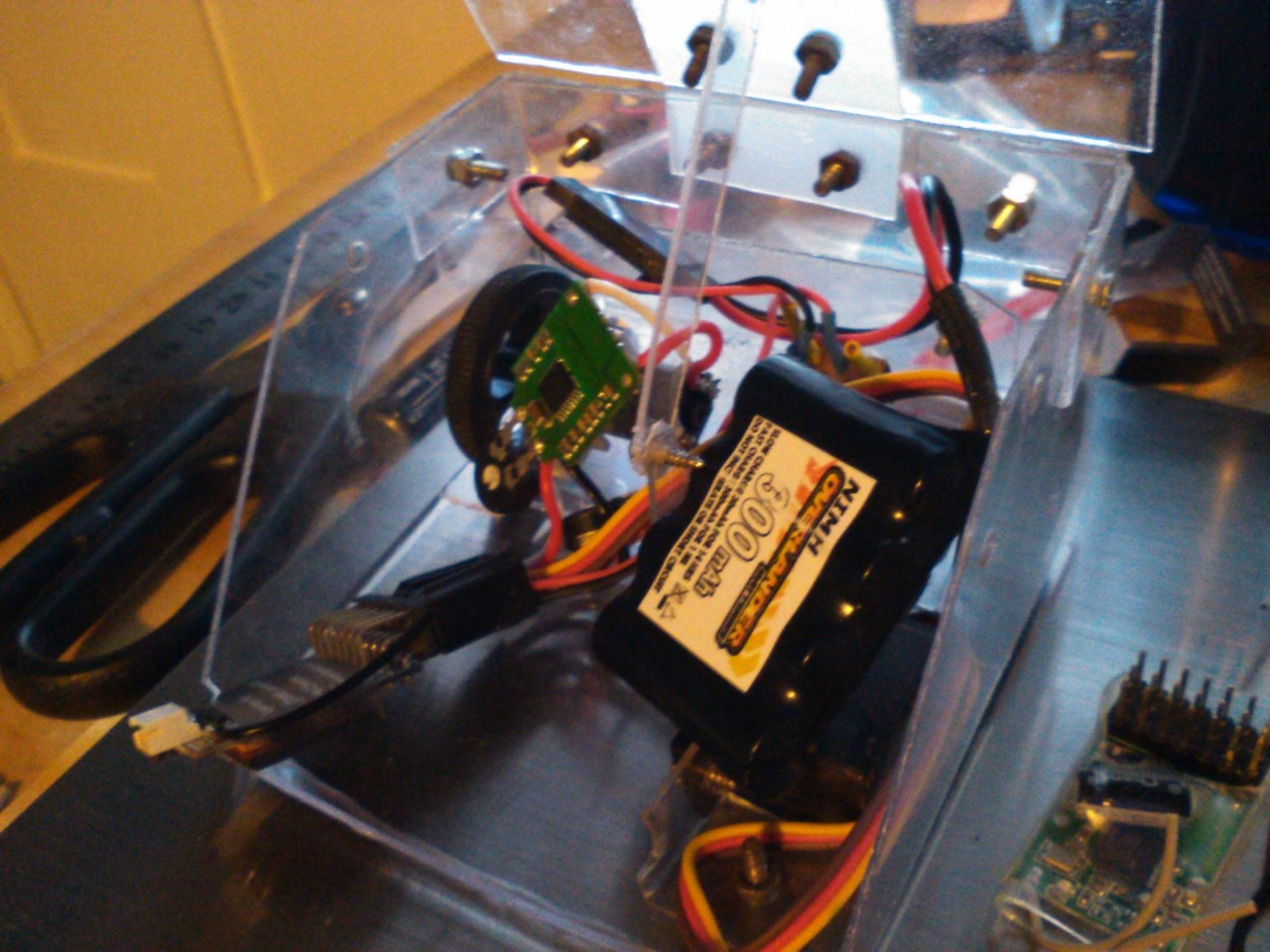
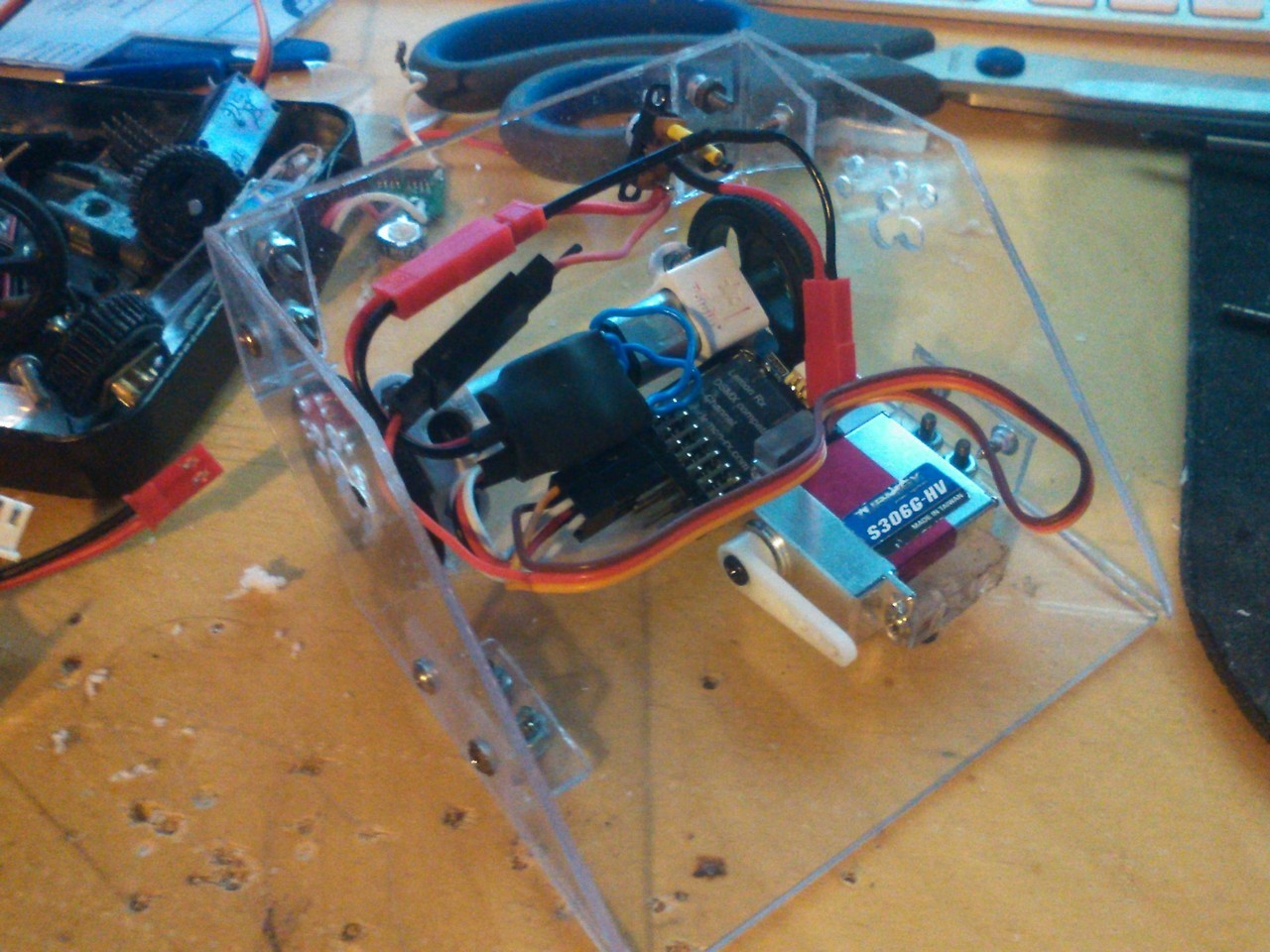
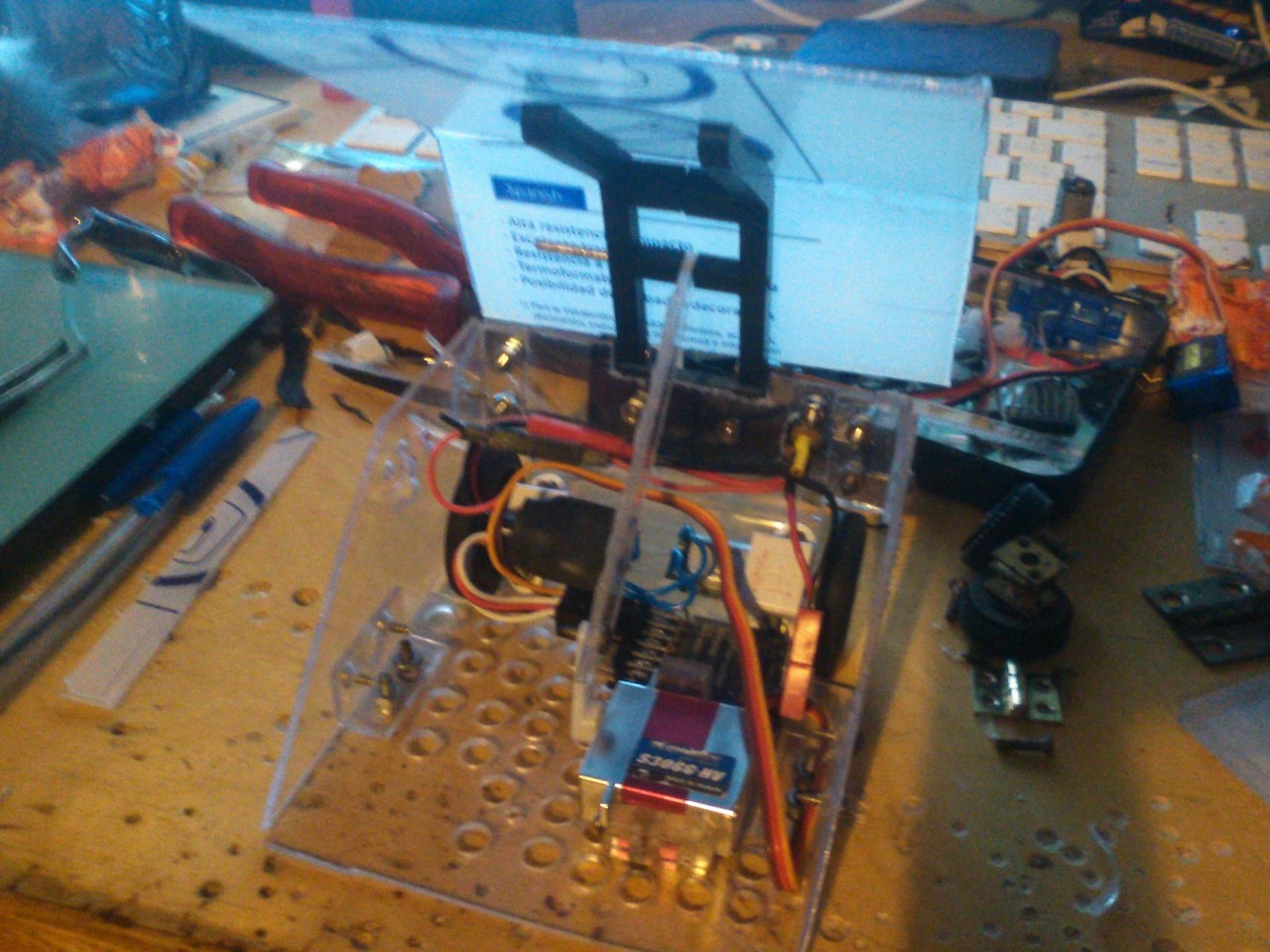
Added the mount for the receiver the most neat and tidy wires I ever had in a robot. Just need to add the battery and its holder then get a new servo down the line.
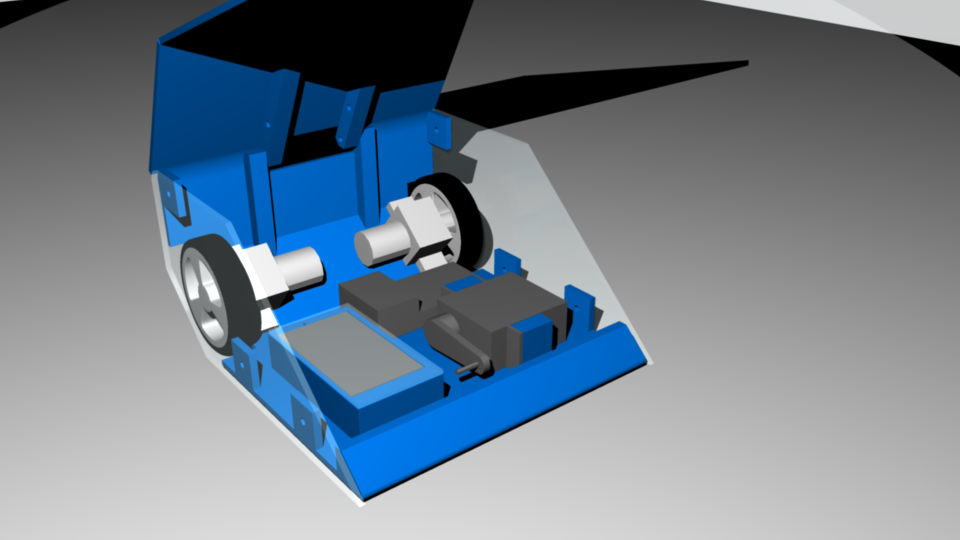
Encountering a very odd and worrying bug with Killer-Wolf's drive the left motor stutters at times and isn't putting out the same power in reverse. not sure where to start looking for the solution.
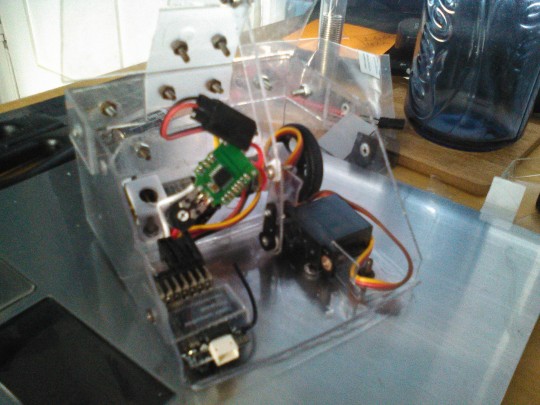
Ok re-alinged the left motor and put the temp battery in the middle of the robot seems the robot is driving better the stuttering might be a random issue, I think the ESC for the left motor might have been getting interference from resting against one of the motors, although I'll let the people more experienced with electronics in robots to correct me on that.
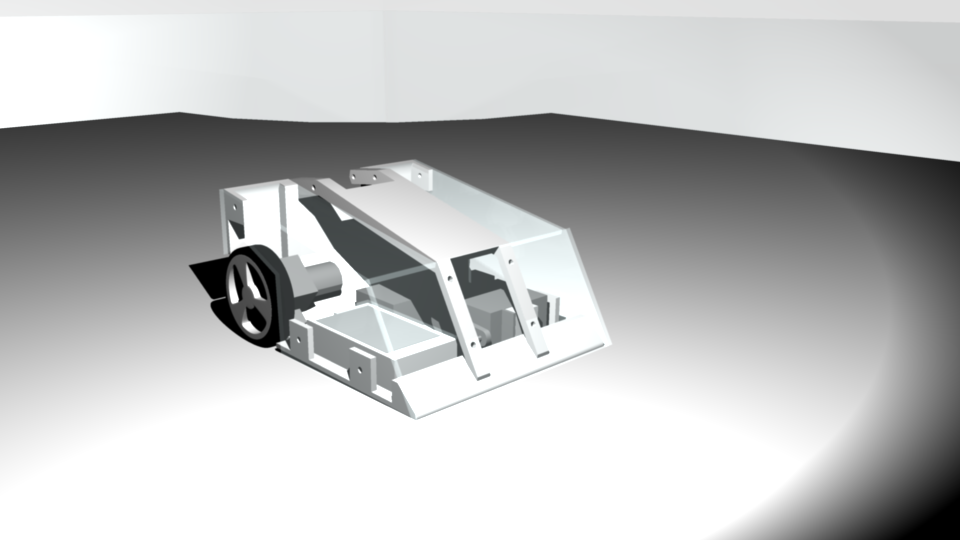
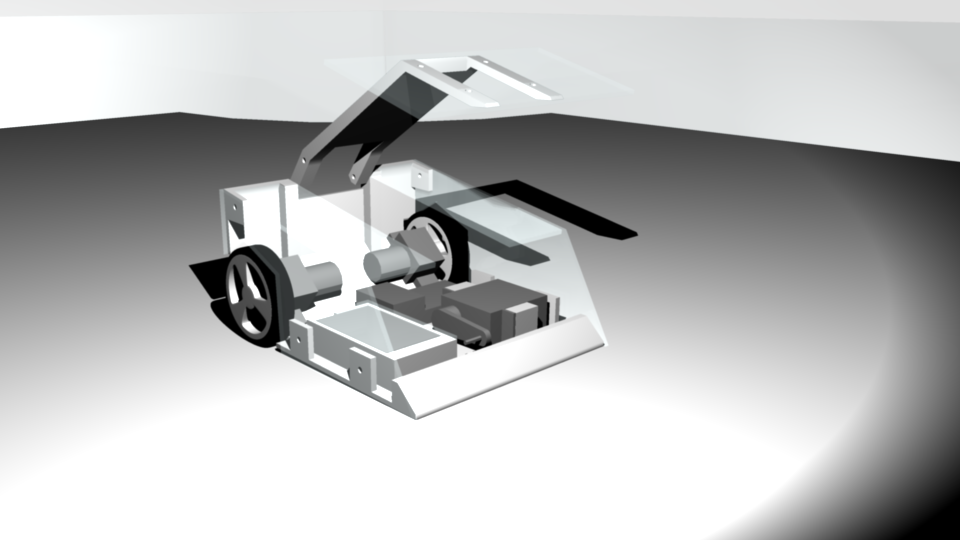
I also tested out Killer-Wolf's self-righting roll fins and they work (in none combat situations).
Hardware wise my balance charger arrived but I have to wait till Xmas before I can use it (and no I didn't peek at my presents).
Also thought I share the test/ play arena we will start to use for testing our robots on.
 Tweet
Tweet




Comment