 Tweet
Tweet
It's been a while since i last uploaded and with the beetle champs looming i felt it was about time.
You may remember last time i was talking about Atom, the beetleweight Atomic that wasn't a spinner, because i'd got bored of spinners. Well Atom is still very much a thing, but guess what i went and done? designed a new spinner, because that's sensible right?
I'll get to that in a minute, but first a little Atom update.
The first thing i did was to start on the huge steel wedge, suffice to say i will not attempt to replicate this ever again without a proper vice (i bent 3mm steel with a big set of pliers whilst the sheet was clamped to my kitchen counter, it sucked to do).

 That's just after the bending, no filed edges yet. I was actually really happy with how it turned out even if it damn near killed me to do it.
That's just after the bending, no filed edges yet. I was actually really happy with how it turned out even if it damn near killed me to do it.
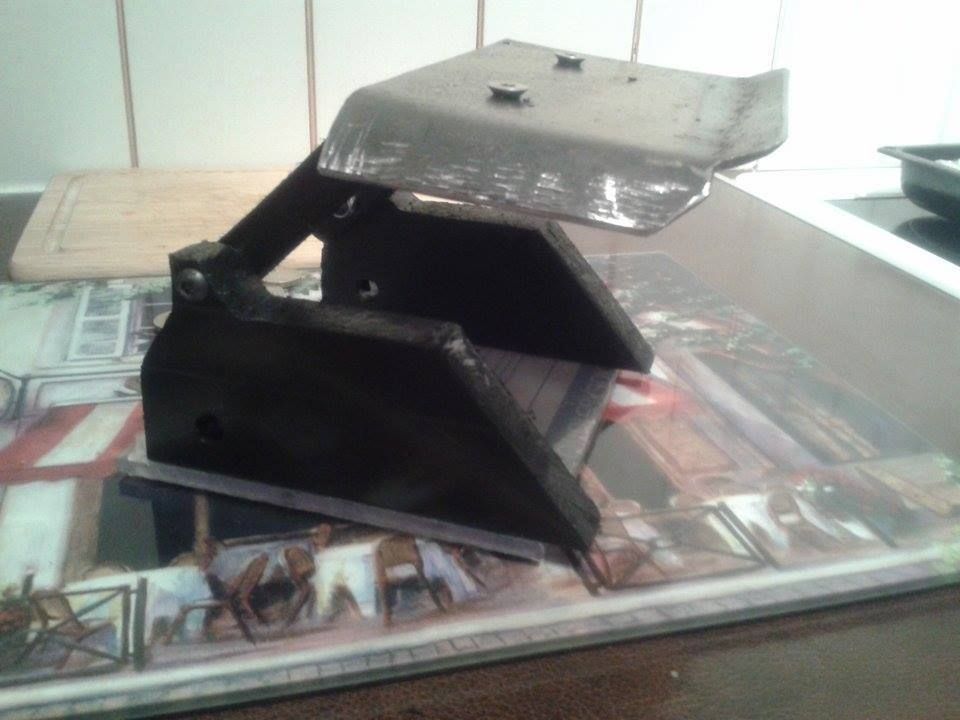 With the edges filed and the lip sharpened, i also mounted it to the flipper arms with some m6 bolts and a nyloc the other side. I will countersink the head, i'm just lazy. Also note the 5mm polycarb baseplate.
With the edges filed and the lip sharpened, i also mounted it to the flipper arms with some m6 bolts and a nyloc the other side. I will countersink the head, i'm just lazy. Also note the 5mm polycarb baseplate.
Now i'll admit, i got lazy and forgot to take pictures of the rest of the build. So i'll fast forward to where it's currently at. The drive has been mounted, as has the lifter servo which has been tested and works rather well, does however need a bit of work to make it self right reliably, but i'll sort that soon.

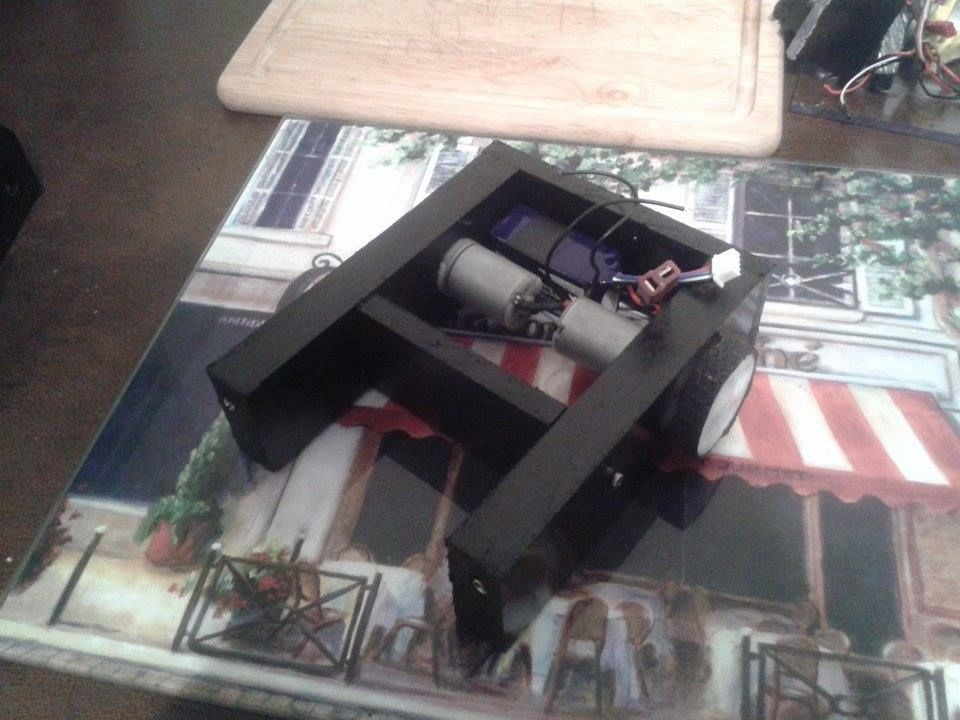
 A couple of pics of the servo and how it's mounted, nothing special. It's just a couple of hdpe mounts which are then bolted to a piece of 5mm polycarb, the servo horn will then be cable tied to the flipper arm so it can be retracted. Under the piece of polycarb sits the drive motors, esc's, rx and batteries.
A couple of pics of the servo and how it's mounted, nothing special. It's just a couple of hdpe mounts which are then bolted to a piece of 5mm polycarb, the servo horn will then be cable tied to the flipper arm so it can be retracted. Under the piece of polycarb sits the drive motors, esc's, rx and batteries.
The eagle eyed among you will have noticed the little robot lurking in the background, that my friends is the replacement for Lynx, called err....Lynx!.
It's a drum bot, because i wanted a spinner, but not a mid cutter or a vertical disc/bar, there's already too many of those.
It's full of bodge and probably going to do terrible but then it's Lynx, so i won't be too surprised. The chassis is a mix of 20mm and 10mm hdpe, standard beetley drive of 1000rpm shadymotors, botbitz 10a esc's, 3s lipo, 28mm outrunner spinning the drum at 12K rpm fairly standard really.
The chassis as it stands currently, the wheel is too small but i didn't have any of the right size for a pretendo. Needs Moar drum though right?

^^
Drum things
It was made by Harry and all credit to him it looks amazing, i should have it in my possession in the next day or two along with the brushless set up to run it. Both robots will be a rush to finish as for the time being at least i'm somewhat unable to build stuff ( i broke fingers, it happens) but with a little help from my dad it should be just about doable.
I'll try and keep the updates regular as things should progress quickly.
Cheers
You may remember last time i was talking about Atom, the beetleweight Atomic that wasn't a spinner, because i'd got bored of spinners. Well Atom is still very much a thing, but guess what i went and done? designed a new spinner, because that's sensible right?
I'll get to that in a minute, but first a little Atom update.
The first thing i did was to start on the huge steel wedge, suffice to say i will not attempt to replicate this ever again without a proper vice (i bent 3mm steel with a big set of pliers whilst the sheet was clamped to my kitchen counter, it sucked to do).
That's just after the bending, no filed edges yet. I was actually really happy with how it turned out even if it damn near killed me to do it.With the edges filed and the lip sharpened, i also mounted it to the flipper arms with some m6 bolts and a nyloc the other side. I will countersink the head, i'm just lazy. Also note the 5mm polycarb baseplate.Now i'll admit, i got lazy and forgot to take pictures of the rest of the build. So i'll fast forward to where it's currently at. The drive has been mounted, as has the lifter servo which has been tested and works rather well, does however need a bit of work to make it self right reliably, but i'll sort that soon.
A couple of pics of the servo and how it's mounted, nothing special. It's just a couple of hdpe mounts which are then bolted to a piece of 5mm polycarb, the servo horn will then be cable tied to the flipper arm so it can be retracted. Under the piece of polycarb sits the drive motors, esc's, rx and batteries. The eagle eyed among you will have noticed the little robot lurking in the background, that my friends is the replacement for Lynx, called err....Lynx!.
It's a drum bot, because i wanted a spinner, but not a mid cutter or a vertical disc/bar, there's already too many of those.
It's full of bodge and probably going to do terrible but then it's Lynx, so i won't be too surprised. The chassis is a mix of 20mm and 10mm hdpe, standard beetley drive of 1000rpm shadymotors, botbitz 10a esc's, 3s lipo, 28mm outrunner spinning the drum at 12K rpm fairly standard really.
The chassis as it stands currently, the wheel is too small but i didn't have any of the right size for a pretendo. Needs Moar drum though right?
^^
Drum things
It was made by Harry and all credit to him it looks amazing, i should have it in my possession in the next day or two along with the brushless set up to run it. Both robots will be a rush to finish as for the time being at least i'm somewhat unable to build stuff ( i broke fingers, it happens) but with a little help from my dad it should be just about doable.
I'll try and keep the updates regular as things should progress quickly.
Cheers
Comment