 Tweet
Tweet
I have not finished designing the weapon system fully yet. Yes they are 12g co2 tanks. i had a crazy idea for an on board fire extinguisher (still playing with that idea)
-
-
when i designed that i was considering using a wheel to run along the inside of the drum. The reason i considered this is to give slip. If the weapon stopped suddenly without any slip i would risk damaging The weapon drive system (i think the motor would explode) though none of this is tested i will most likely build two or three options to figure out the best solution. Thanks for the tip about the belt drive I'm sure i would have run into that problem.Originally posted by Eventorizon View PostComment
-
Ever notice that maybe you have been doing things totally incorrectly? well i did this morning...
Now i am sure to go with a full body spinner i figured a much better way to build the robot.
This new build design will allow for extra battery packs to be added if required.
I will also be able to remove motors quickly if they are damaged.
http://s1177.photobucket.com/user/Ra...build.jpg.htmlComment
-
If you are serious about a rebuild, you need not design it for extra packs to be added. Designing it to accept one known configuration and optimising is better for that kind of machine. Now we are allowed 12S lipos you could design it for two 2650mAh 6 Cell packs (Wired in series and used as a pair) knowing that it will always work and and always fit.
If you want to be able to change it, make the head adjustable so that you can switch between something that cuts, something that clobbers and something that lifts (Or anything really). That is better far better (IMO) than messing with your internals.Comment
-
I'm after a little advice i can foresee have a big problem with radio interference. This robot will be a full body spinner and i am pretty sure that i may have to try many aerial / radio systems.
Basically i am just wondering if anyone has had similar problems or knows of a good salutation before i invest in many different types of RC systems.
Any advice would be useful.Comment
-
Comment
-
I doubt you will get interference or a blocked signal even with a full body spinner. LS4 has no issues with normal spektrum transmitters and receivers. If you are that worried you can get receivers designed to go inside all carbon fibre aircraft (Carbon fibre blocks 2.4Ghz).
For a long time we couldn't control Binky with its 2mm armour on but it turned out that it was a combination of 2 BECs, and a crap orange receiver that were doing us in. With 1 BEC and a genuine spektrum receiver, I had control of Binky from over 30m away.Comment
-
Perfect. Thank you so much. I was expecting this to be a major problem.Comment
-
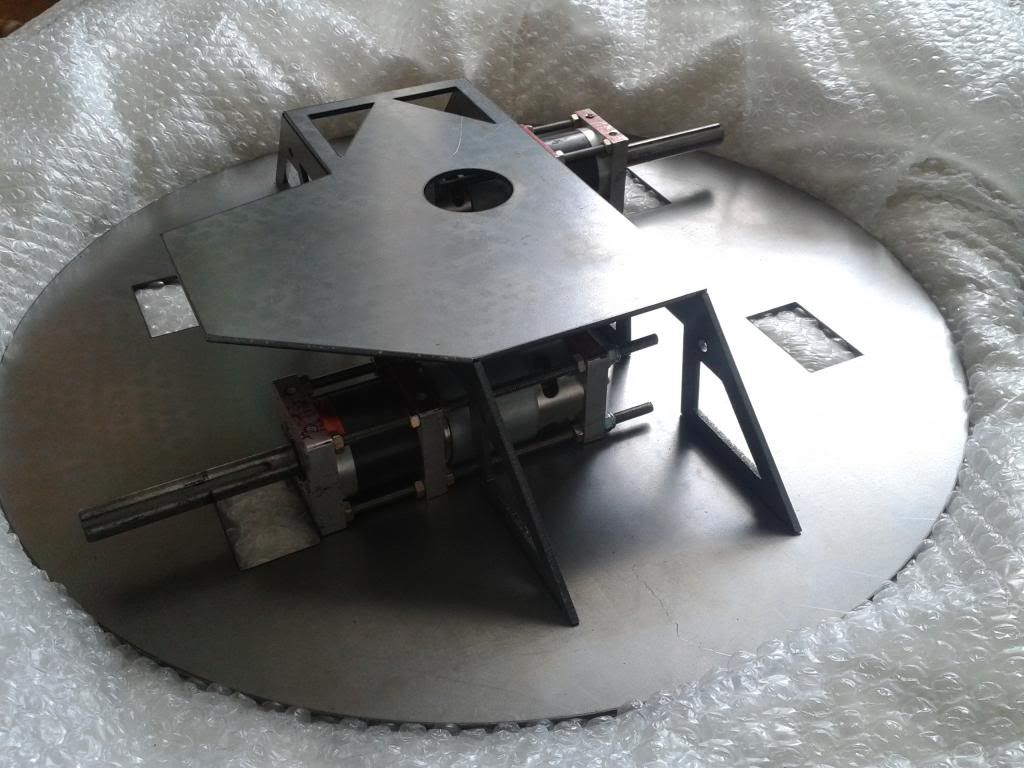
The new steel arrived today but it's very wrong due to my mistakes when converting from sketch up to draft sight... DERP!.
http://s1177.photobucket.com/user/Ra...tml?sort=3&o=7
Also 4mm steel is way to heavy.
This is just the base plate and weighs in at 5kgs.
http://s1177.photobucket.com/user/Ra...tml?sort=3&o=6
Looks good though and i was able to place some parts just to test fit.
http://s1177.photobucket.com/user/Ra...tml?sort=3&o=1
http://s1177.photobucket.com/user/Ra...tml?sort=3&o=4
http://s1177.photobucket.com/user/Ra...tml?sort=3&o=5Comment
-
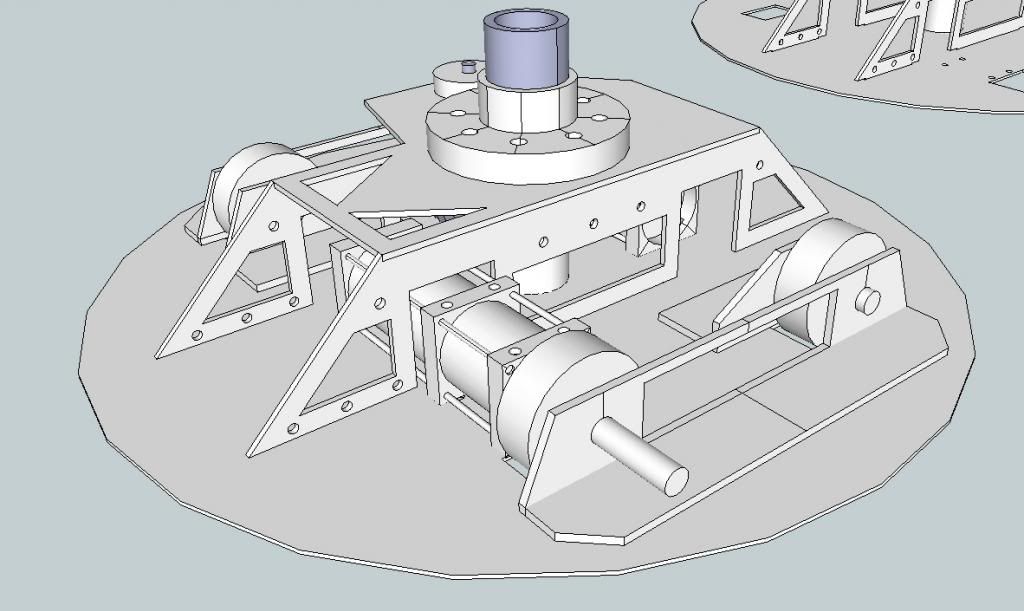
New chassis is really starting to take shape.


As i don't have a lathe or even access to one. Would anyone be able to recommend an engineering company that could turn a shaft down for my weapon mount?Comment
-
Looking really nice
I would be a bit worried about that base. It must be heavy and the cads dont show it being very well braced.
I had a 3mm front scoop on my feather and it was reasonably braced and its bent to hell after an event.
I will recommend people and in return could you mention where you got the steel cut?
Kenny, not sure he is about robot wise but he is a working freelance engineer
http://www.fightingrobots.co.uk/members/755-kenny
Famous maddox is the guy to go to for random specialties like gearboxes and rams
http://www.fightingrobots.co.uk/members/1160-maddox10
But there is countless people on this forum who have lathes and some one may pop up and offer to help you out or recommend someone else.Comment
-
I would add in some cross braces to the two vertical pieces, creating a rigid welded/bolted box in the centre of the robot. All the force will be going through it so it needs to be very strong. Also, how much does it currently weigh in that last photo?Comment
-
In the last picture it weighs almost 5kgs (Chassis and drive motors) I understand it may still need bracing but for now i need to get most of the main parts fitted correctly and working, then i can work out how much weight i have to play with for extra bracing.
I found this ebay shop that will cut steel to your shapes and sizes. i just give them a DXF file i made in DraftSight. They seem to get the parts cut and shipped really quickly too.
http://stores.ebay.co.uk/gdiproducts...p2047675.l2563Comment
-
Wow, thats actually really good price!
Thanks for that, good find.Comment
-
By the way, what sort of size/diameter is the robot??Comment




Comment