 Tweet
Tweet
Not exactly a robot but I've recently completed an electric scooter conversion/rebuild. Essentially I started off with a broken one of these off ebay:

It's a small children's scooter with a 24v 100W motor and 4200mAh of lead acid batteries. Designed for maximum 10mph (presumably if you weigh as much as a small child)
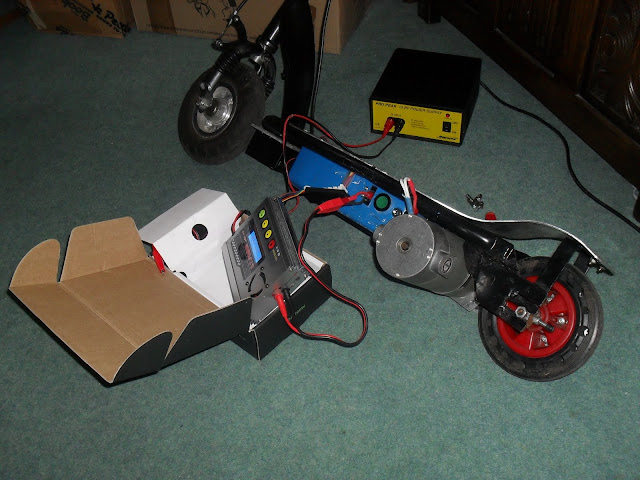
After a few modifications it looks like:

I've
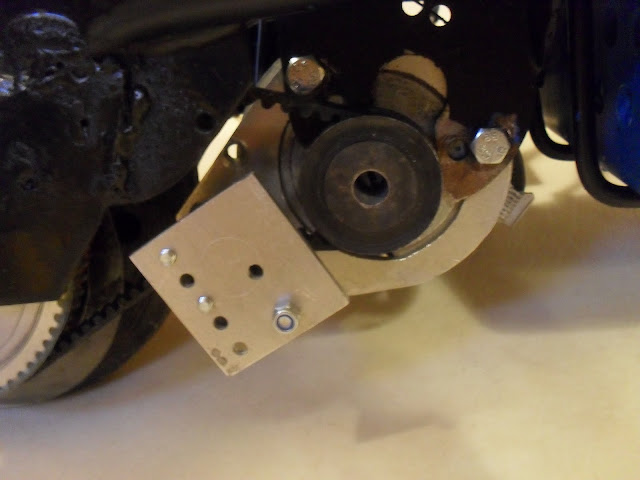
- Replaced drive motor with a hefty Litton (a motor rated '800 watts at 40 amps for 10 mins')
- Rewelded rear shaft assembly to fit larger wheel
- Drive changed to 5mm HTD timing pulley/belt
- Batteries changed to 22.2v 15600mAh Li-Po
- Controller changed to 4QD Uni 8 (with regenerative braking and acceleration ramping - which you need!)
- Plus a few other minor things



Theoretical top speed now 17mph with slightly insane acceleration, video coming soon
(yes the motor looks silly sticking out the side)
It's a small children's scooter with a 24v 100W motor and 4200mAh of lead acid batteries. Designed for maximum 10mph (presumably if you weigh as much as a small child)
After a few modifications it looks like:
I've
- Replaced drive motor with a hefty Litton (a motor rated '800 watts at 40 amps for 10 mins')
- Rewelded rear shaft assembly to fit larger wheel
- Drive changed to 5mm HTD timing pulley/belt
- Batteries changed to 22.2v 15600mAh Li-Po
- Controller changed to 4QD Uni 8 (with regenerative braking and acceleration ramping - which you need!)
- Plus a few other minor things
Theoretical top speed now 17mph with slightly insane acceleration, video coming soon
(yes the motor looks silly sticking out the side)

Comment